Overview
In mechanical engineering, robotics and animations, kinematics is used to describe the motion of systems composed of joined parts such as an engine, a robotic arm or the human skeleton. Robot Kinematics is a light-weight C API specifically designed for robotics. They compute transformations of kinematic chain with rotary joints. The main applications are for robot arms, quadruped robots and humanoid robots.
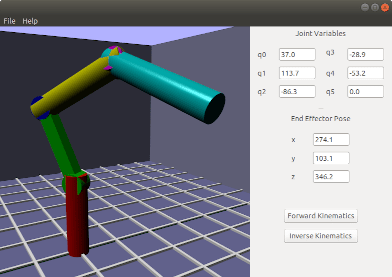
With the application of some linear algebra, forward kinematics is done by iterative multiplication of transform matrices each computed from DH (Denavit Hartenberg) parameters for each link transform. The library also handles the resultant matrix for extraction of translation vector and rotation in Euler Angles (roll, pitch and yaw). Using forward kinematics, the output of a mechanism obtained from joint variables can be computed and visualized (both translation and rotation).
For inverse kinematics which is needed for obtaining joint variables for a specific coordinate of an end-effector. FABRIK (Forward And Backward Reaching Inverse Kinematics) which is very popular in the era of ragged doll animations is used with some modifications to fit our application.