Home
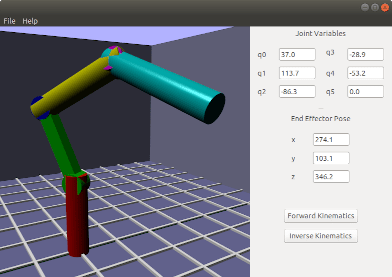
Welcome to Robot Kinematics - the open-source mathematical API for kinematic chains with revolute joints.
This wiki is the main source of documentation for developers working with (or contributing to) the Robot Kinematics project.
Welcome to Robot Kinematics - the open-source mathematical API for kinematic chains with revolute joints.
This wiki is the main source of documentation for developers working with (or contributing to) the Robot Kinematics project.