Forward Kinematics
To calculate the position and orientation of an end-effector of a mechanism from joint variables (eg: the angles rotated by each motor), forward kinematics is used.
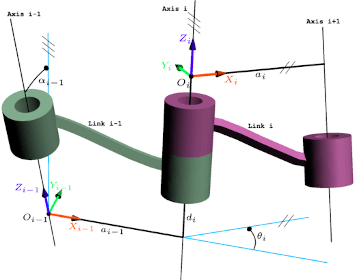
For each link, the transform of one joint to another is expressed in DH parameters. In this expression, the axis for joint variable (eg: motor shaft axis) is the z-axis. The x-axis is the head representing the orientation of the link.

In the computation of forward kinematics, successive multiplication of matrices are done and resultant matrices for each link is obtained. It is noted that the matrices here are partitioned into 2 parts, rotation and translation. For the resultant matrix, the rotation part is the orientation of the body and the translation part is the position vector of the body.
There are 4 parameters in DH each of which has its own transform operation.

Translation along the z-axis.

Rotates about the z-axis, the rotor axis. The value is the DH parameter plus joint variable.

Translates along the rotated x-axis.

Rotates the next joint's rotor axis about the x-axis.
Putting all these together,
