Dataset of Human Human Handovers

Reference Article: https://doi.org/10.48550/arXiv.2304.02154
A total of 13 participant pairs (26 participants involved). For each pair, they were assigned participant 1 and participant 2. The baton was transferred to and fro between them. The baton has 2 6D Force/Torque sensors on sides for recording the grip forces and one sensor in between for interaction force. The particpants wear motion capture suits (MoCap) and the experiment occured in a MoCap room. The upeer body movement and the baton pose is tracked.
The Experimentation done in sets of approximately 9 minutes each. We had three experimental settings:
- Setting1- Normal baton transfer - 0.8 kg baton , Set 1 and Set 2
- Setting2- Heavy baton transfer - 1.8 kg baton , Set 3 and Set 4
- Setting3- Giver vision impairment with normal baton - 0.8 kg, Set 5 and Set 6
The data set is provided for each participant pair for each settting and corresponding set. Example: Pair1/Setting1/Set1
Order of sets in experimentation for:
Pair 1 : Set1 Set3 Set5 Set2 Set4 Set6
Pair 2 : Set1 Set3 Set2 Set5 Set4 Set6
Pair 3 : Set1 Set5 Set2 Set3 Set6 Set4
Pair 4 : Set1 Set3 Set2 Set5 Set4 Set6
Pair 5 : Set1 Set3 Set5 Set2 Set6 Set4
Pair 6 : Set1 Set3 Set5 Set2 Set6 Set4
Pair 7 : Set1 Set3 Set2 Set5 Set4 Set6
Pair 8 : Set1 Set3 Set5 Set2 Set6 Set4
Pair 9 : Set1 Set5 Set2 Set3 Set6 Set4
Pair 10 : Set1 Set3 Set2 Set5 Set4 Set6
Pair 11 : Set1 Set3 Set5 Set2 Set6 Set4
Pair 12 : Set1 Set5 Set2 Set3 Set6 Set4
Pair 13 : Set1 Set3 Set5 Set2 Set6 Set4
Each Set data has 2 zipped folders: 'handovers' and 'handovers_reverse'. The 'handovers' folder contains all recorded and segmented handovers as separate folders when participant 1 acts as giver and passed the baton to participant 2, who acted as taker. The 'handovers_reverse' contains all handovers when participant 2 acted as giver and participant 1 as taker. This is done for purely analytical purposes.
Each handover folder has 30 .csv files, with 801 rows implying the saved duration (@120 Hz = 6.675 seconds) of the handover representing:
- Wrench Taker - Fx,Fy,Fz,Tx,Ty,Tz (6 columns with title/header in first row)
- Wrench Giver - Fx,Fy,Fz,Tx,Ty,Tz
- Wrench Interaction- Fx,Fy,Fz,Tx,Ty,Tz
- Baton pose - x,y,z,q0,q1,q2,q3 (7 columns with title/header in first row)
- 5-17. Giver upper body skeletal representation- pose of 13 individual frames
- 18-30 Taker upper body skeletal representation- pose of 13 individual frames
Above can be seen in the handover_Sample folder provided which has data of a sample handover. The grip forces are given by -Fz from giver/taker wrench.
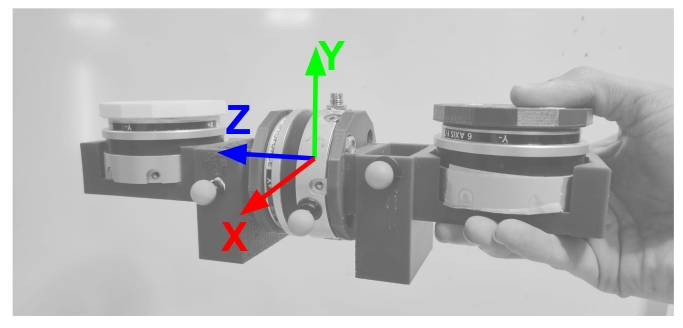
By default, the interaction-force/torque sensor is aligned from participant 1 towards participant 2, i.e. the participant 1 acting as giver and participant 2 as the taker ('handovers' folders). (See Figure Interaction sensor with axis)
{kind=link}
Please note the transformation in forces done for the interaction sensor for the 'reverse_handovers' case, based on observed data from sensor:
- Fx = -1*Fx_int_measured
- Fy = -1*Fy_int_measured
- Fz = -1*Fz_int_measured
- Tx = -1*Tx_int_measured
- Ty = -1*Ty_int_measured
- Tz = -1*Tz_int_measured
The F/T HEX sensors from Onrobots : https://onrobot.com/en/products/hex-6-axis-force-torque-sensor Datasheet: https://onrobot.com/sites/default/files/documents/Datasheet_HEX_QC_v1.3_EN.pdf
The MoCap setup from Motive: https://optitrack.com/ The setup used: Software- MOTIVE 3.0 Cameras- 8x PrimeX13 Cameras (along the sides of the room) 4x PrimeX13W Wide-angle Cameras (in the corners of the room)
"A Multimodal Data Set of Human Handovers with Design Implications for Human-Robot Handovers," by Parag Khanna et al in IEEE RO-MAN (IEEE International Conference on Robot and Human Interactive Communication), 2023
Please use:
P. Khanna, M. Björkman and C. Smith, "A Multimodal Data Set of Human Handovers with Design Implications for Human-Robot Handovers," 2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Busan, Korea, Republic of, 2023, pp. 1843-1850, doi: 10.1109/RO-MAN57019.2023.10309537.
@INPROCEEDINGS{10309537,
author={Khanna, Parag and Björkman, Mårten and Smith, Christian},
booktitle={2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)},
title={A Multimodal Data Set of Human Handovers with Design Implications for Human-Robot Handovers},
year={2023},
volume={},
number={},
pages={1843-1850},
doi={10.1109/RO-MAN57019