CameraInfo's projection matrix not updating when resolution changes #705
Comments
|
Any update on this? This issue is causing major issues for a project I'm on. |
|
Not really sure which Gazebo version are you using @andyblarblar, but I backported some commits that should fix the issue gazebosim/gz-sensors#383 |
Yeah, sorry for not giving more details. I've been having issues in garden 7.6 binary release. I can try fortress as well to see if anything has changed, because I'm on Humble. |
|
This seems to still be a problem in Gazebo Harmonic. I changed the resolution of my camera to a higher resolution and checked the camera_info message which now has an intrinsic matrix that doesn't make much sense (especially cx and cy). |
Environment
Description
Steps to reproduce
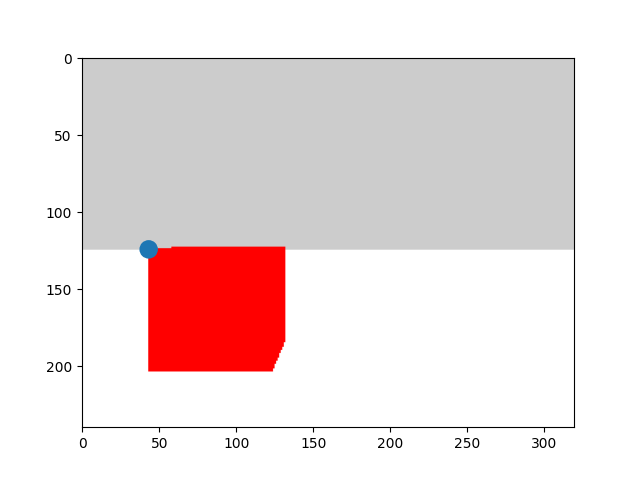
Example World 1 (camera resolution 320x240 [default])
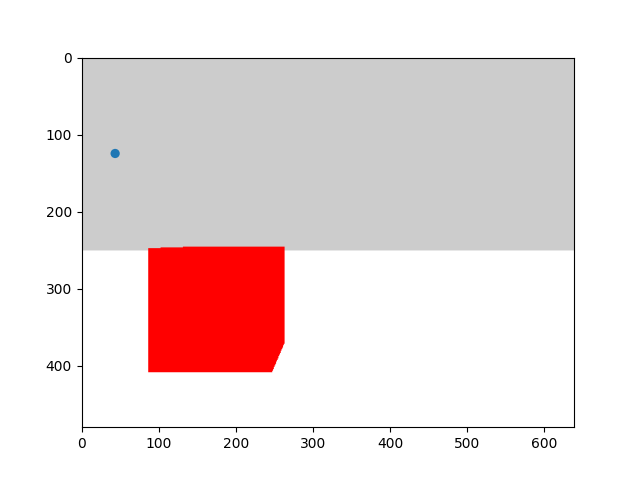
Example World 2 (camera resolution 640x480)
Both worlds are identical except for the resolution of the camera. The camera resolution being different means that the projection matrix published under
/camera_infoshould change; however, it doesn't. For both worlds it iswhereas for the second world, it should be
This leads to problems down the line because projections are off:
Projection World 1
Projection World 2
There are also two lower-level problems:
Here is the full code to produce the images above.
Code
To run this, a working
gym-ignitionandropy[ignition](not on pypi yet, but easy to install locally) installation are required.The text was updated successfully, but these errors were encountered: