This is the code for the Localization Navigation and Smart Mobility project (09/2020).
We handle a localization problem by formulating the model, implementing a positioning method and assessing the related performance in Matlab environment.
Clone or download the repository somewhere on your PC.
In the GR35 folder are placed the measurements for the various tasks.
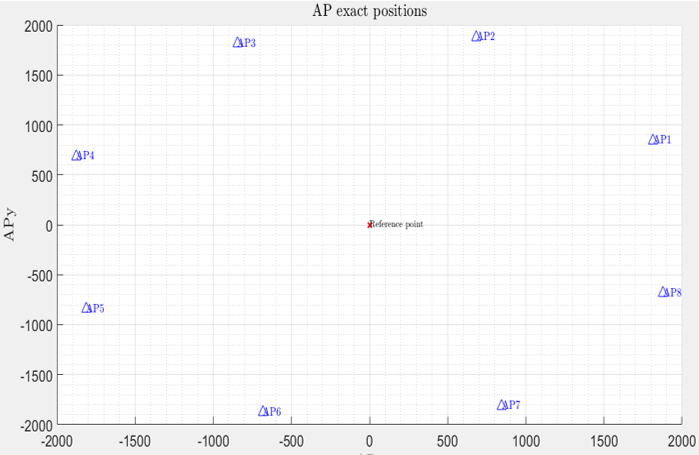
The are 8 Access Points and 1 user location.
Each task could be useful for the next ones thus their order of execution is relevant.
Matlab is required.
Run main.m :
First we need to find the exact location of the APs (that won't change during the tasks) using measurements with no noise.
Then the covariance matrix of TOA measurements is computed.
We observe the trajectory dataset and since 1)Ux,Ux,Vx,Vy are given 2)There is a random acceleration process whose mean is 0 while the variance is not 0 we came to the conclusion that this is a M3 motion model: Random Force model.

(first 10 M3 user trajectories)
Implementation of an Extended Kalman Filter over a known user trajectory and using the previous results obtained by tasks 1,2.
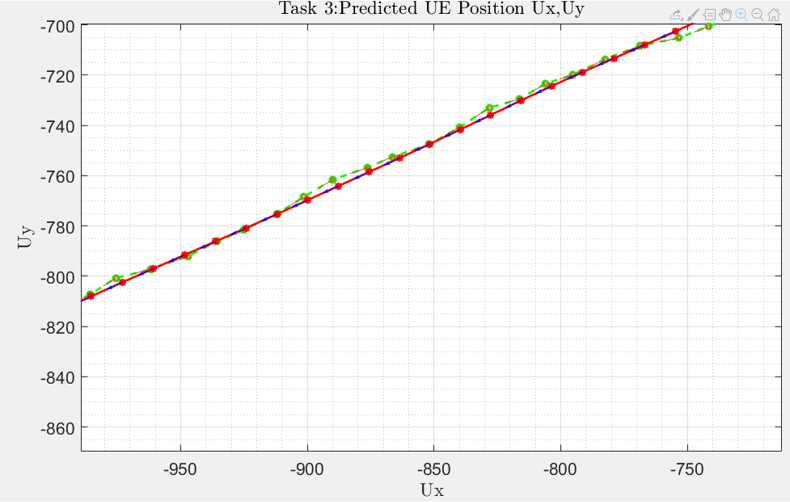
(red is the real trajectory; green is the predicted one by the Extended Kalman Filter)
Implement an Extended Kalman Filter by using the variable “rhoUEAP.mat” in “Task4_rhoUEAP_GRXX.mat”. An Iterative NLS procedure is used in order to cope with the unknown trajectory scenario.
The reconstructed trajectory should emulate a car, which at the beginning is moving at 50 km/h (almost 14 m/s ) along the x-axis.
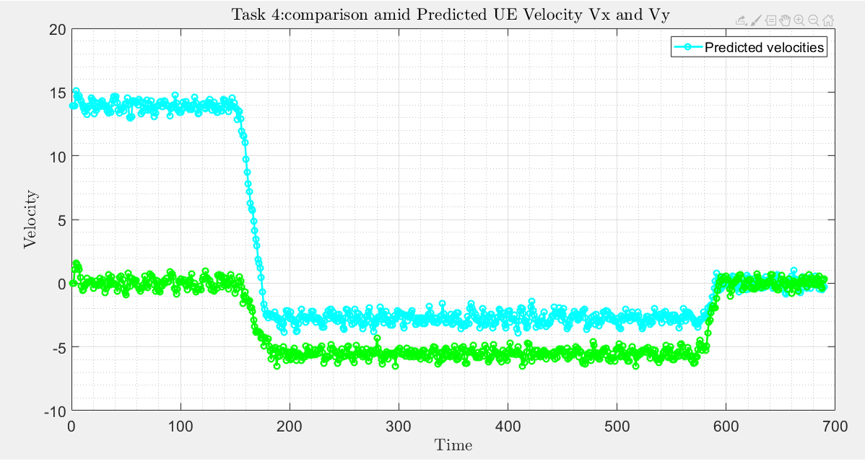
(predicted velocities in m/s)
Implement an Extended Kalman Filter by using the variable “rhoUEAP.mat” in “Task5_rhoUEAP_GRXX.mat”.An Iterative NLS procedure is used in order to cope with the unknown trajectory scenario.
In this task we deal with missing measurements from some/all the 8 APs that make the estimated location less accurate w.r.t. previous tasks.
- Fabio Carminati Github fabio3.carminati@mail.polimi.it
- Emanuele Gallone Github emanuele.gallone@mail.polimi.it
In the plots we use a pre-existing function the plot_dir: thanks to Kangwon Lee (2020). Plot With Direction (https://www.mathworks.com/matlabcentral/fileexchange/1676-plot-with-direction), MATLAB Central File Exchange.
This project is licensed under the MIT License - see the LICENSE.md file for details