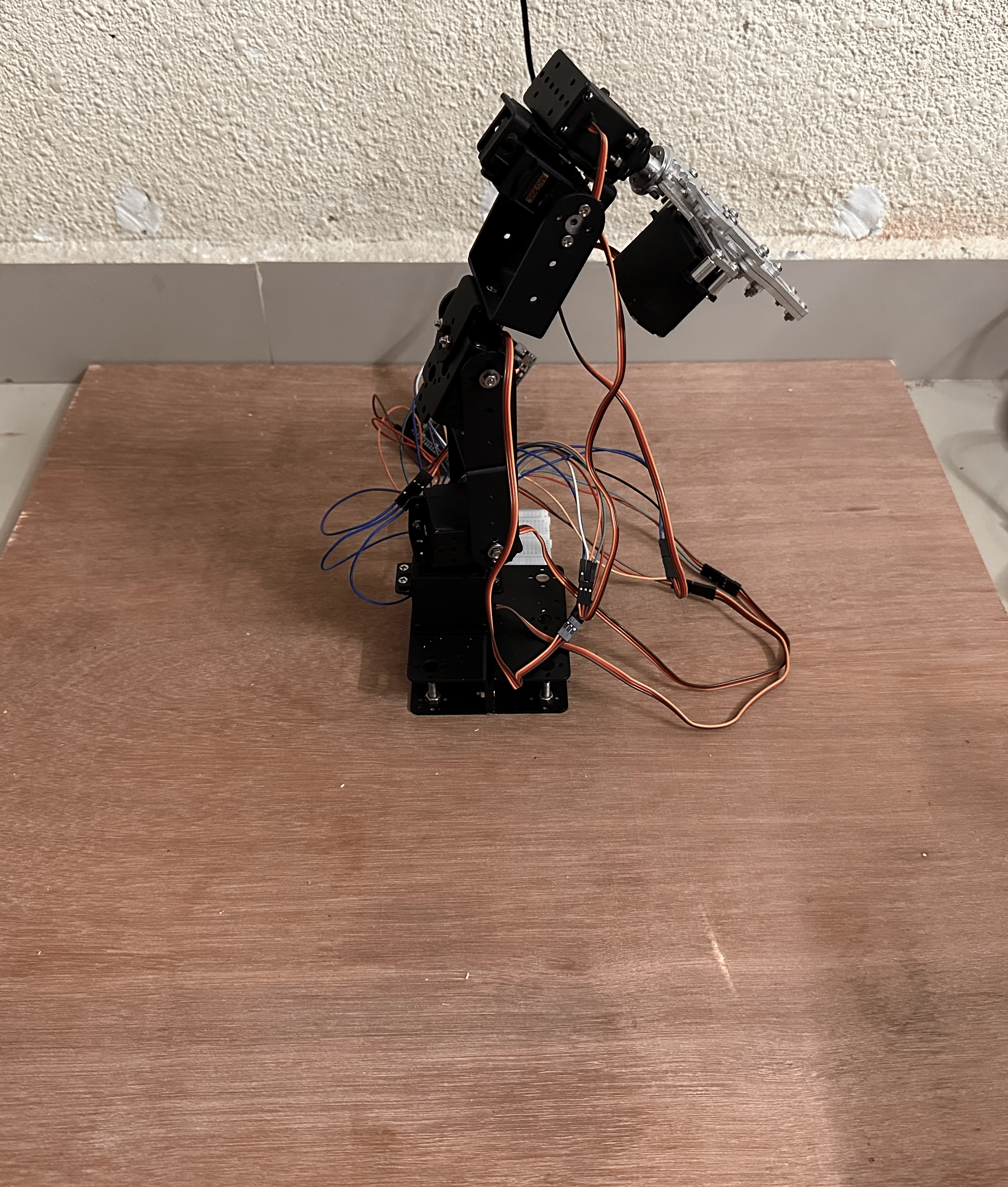
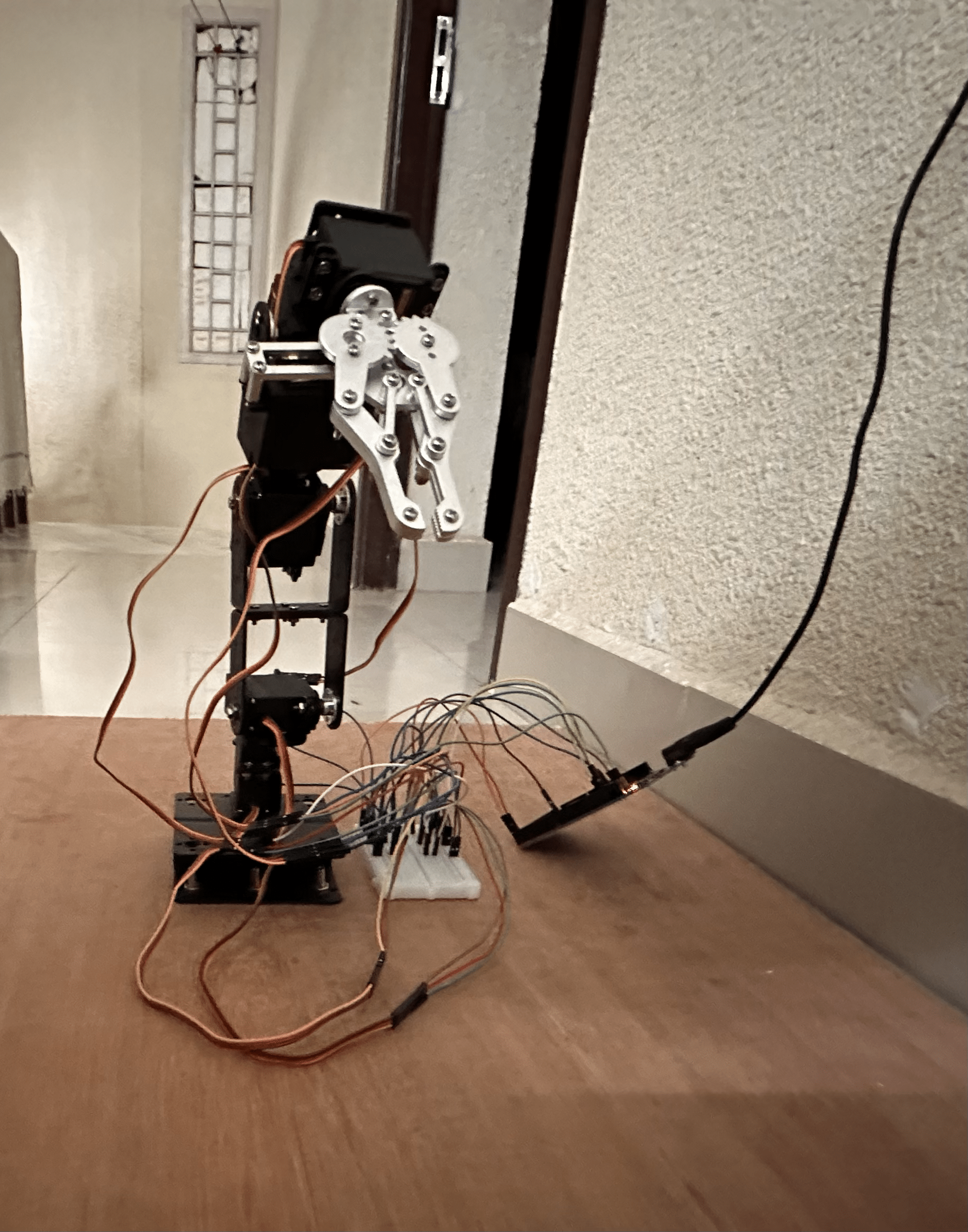
- This project presents an IoT-based 6 Degree of Freedom (6DOF) robotic arm that can be controlled remotely through a web application in a local network.
- The arm is designed to be controlled via a user-friendly web interface and can be manipulated to a specific spatial point using the inverse kinematics (DH) algorithm.
- The system is developed using open-source hardware and software, making it affordable and accessible to a wide range of users.
POST /rotate?arm=1&angle=180| Parameter | Type | Description | Required |
|---|---|---|---|
arm |
number |
Link/Arm [1..6] | ✅ |
angle |
number |
Angle(deg) [0..180] | ✅ |
POST /move?x=10&y=5&z=12| Parameter | Type | Description | Required |
|---|---|---|---|
x |
number |
X coordinate | ✅ |
y |
number |
Y coordinate | ✅ |
z |
number |
Z coordinate | ✅ |
- To run this project, you will need to add the following variables to your:
| File | Directory | Variables |
|---|---|---|
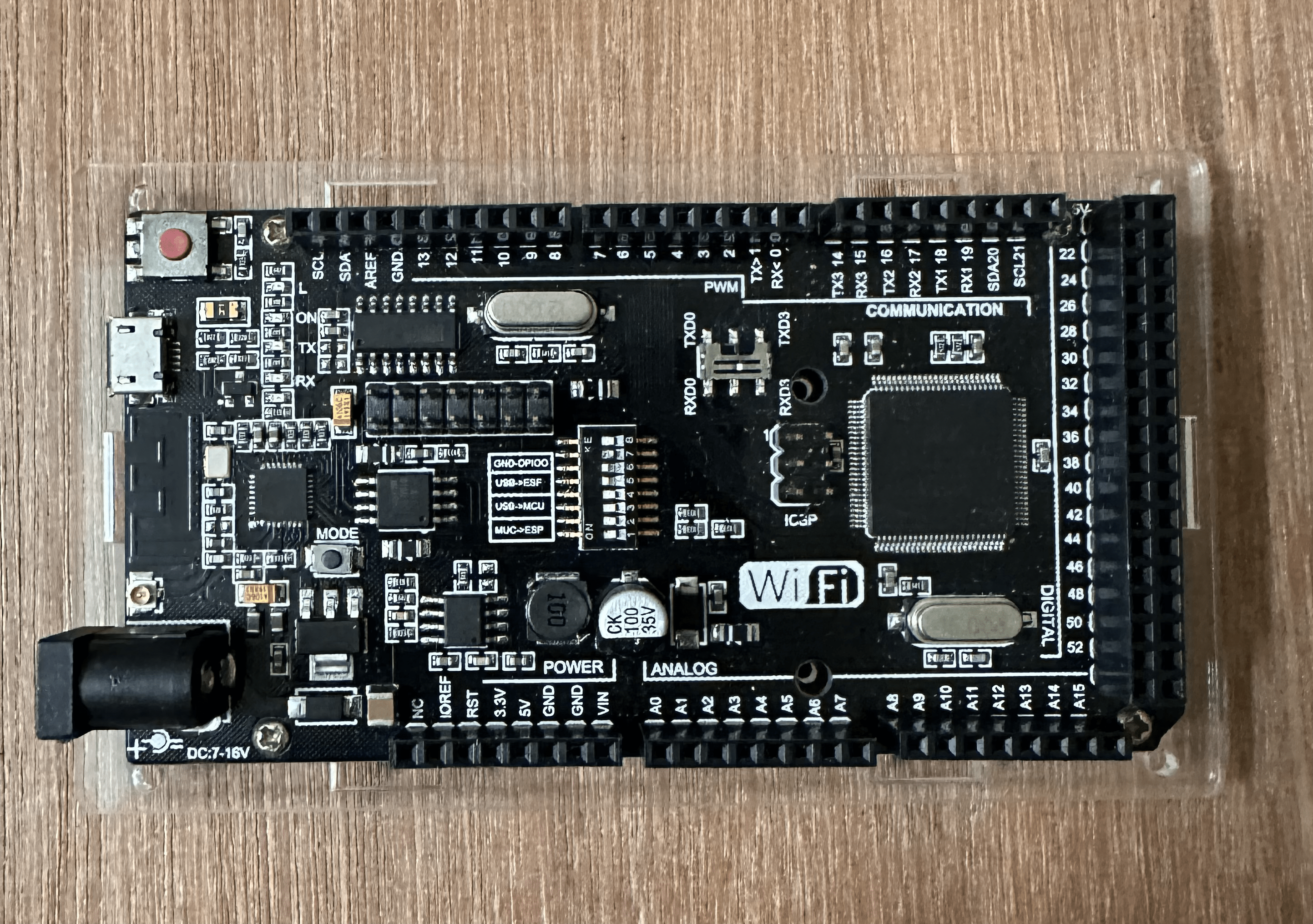
config.h |
/arduino |
SSID = WiFi_NAME |
PASS = WiFi_PASS |
||
config.js |
/client/js |
HOST = LOCAL_IP |
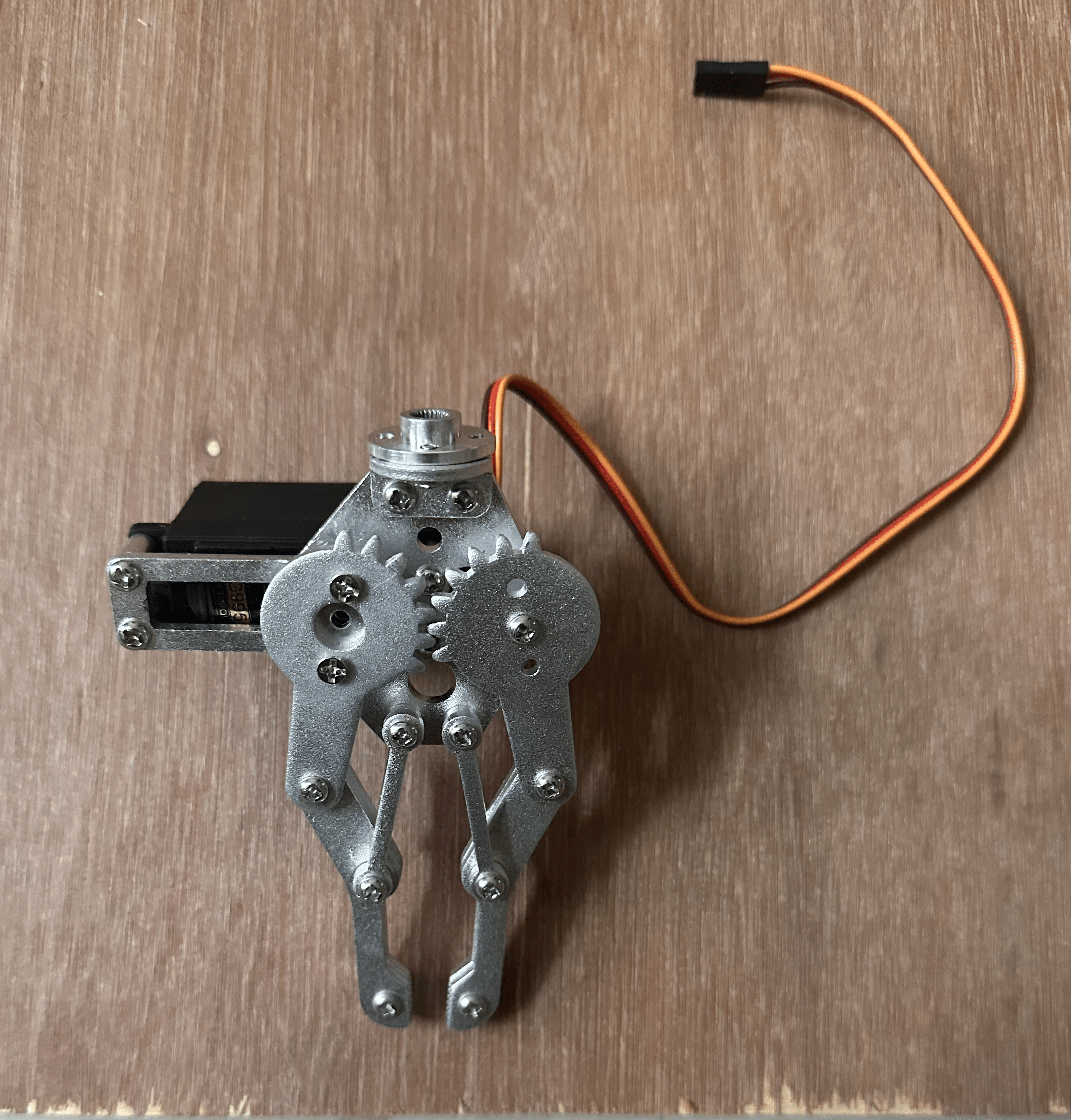
| Robot | Components |
|---|---|
 |
 |
 |
 |