As Augmented Reality becomes more common on the smartphone devices, new features are being introduced by the native APIs that enable AR-enabled experiences to access more detailed information about the environment in which the user is located. Depth API is one such feature, as it would allow authors of WebXR-powered experiences to obtain information about the distance from the user’s device to the real world geometry in the user’s environment.
One example of a tech demonstration of the Depth API running on a smartphone (Android): https://play.google.com/store/apps/details?id=com.google.ar.unity.arcore_depth_lab
Given technical limitations of currently available native APIs, the main foreseen use case of the WebXR’s Depth API would be providing more believable interactions with the user's environment by feeding the depth map into the physics engine used. More advanced engines could leverage obtained depth data, along with the user’s pose, and attempt to reconstruct a more detailed map of the user’s environment.
Some specific examples and experiences that could be provided using the depth data for physics are:
- using the depth data for collision detection - projectiles burst when they hit a real world object, balls bounce off the furniture, virtual car hits a wall, sound propagates differently based on the proximity to the environment, etc
- as a more advanced use case, the depth data, along with the device pose, could also be used to attempt to reconstruct users' environment
- using the depth data for path finding - robot navigates across a cluttered room
Secondary use case of the Depth API would be to provide applications with data that could be used for occlusion when rendering virtual objects. This use case is more sensitive to the quality of data, as any inaccuracies will likely be noticeable to the users. Depending on the provided depth buffer’s resolution and accuracy of data returned from the devices, the applications may choose not to leverage Depth API for this purpose. Therefore, the Depth API is not designed primarily with this use case in mind, but should be sufficiently flexible to be extended in the future.
- Request the feature to be available on a session using its feature descriptor:
const session = await navigator.xr.requestSession("immersive-ar", {
requiredFeatures: ["depth-sensing"],
depthSensing: {
usagePreference: ["cpu-optimized", "gpu-optimized"],
formatPreference: ["luminance-alpha", "float32"]
}
});Note that the usage and format preferences should omit values that the site knows it can't support in advance. In addition, only the "luminance-alpha" data format is guaranteed to be supported. User agents can optionally support more formats if they choose so. User agents that support depth-sensing API should also support at least one usage mode.
- Inspect the usage and format that was selected by the user agent & react appropriately:
console.log(session.depthUsage);
console.log(session.depthFormat);
// Other setup, for example prepare appropriate shader depending on
// the depth data format if using WebGL to access the data.- Retrieve & use the data. Irrespective of the usage,
XRDepthInformation& derived interfaces are only valid within the requestAnimationFrame() callback (i.e. only if theXRFrameisactiveandanimated) in which they were obtained.
"cpu-optimized"usage mode:
const view = ...; // Obtained from a viewer pose.
const depthInfo = frame.getDepthInformation(view);
if(depthInfo == null) {
... // Handle the case where current frame does not carry depth information.
}
// Obtain the depth at (x, y) normalized view coordinates:
const depthInMeters = depthInfo.getDepthInMeters(x, y);Alternatively, the depth data is also available via the depthInfo.data attribute. The entries are stored in a row-major order, without padding, and the entry size & data format is determined by the depth format that can be queried from the XRSession. The raw values obtained from the buffer can be converted to meters by multiplying the value by depthInfo.rawValueToMeters.
For example, to access the data at row r, column c of the buffer that has "luminance-alpha" format, the app can use:
const uint16Data = new Uint16Array(depthInfo.data);
const index = c + r * depthInfo.width;
const depthInMetres = uint16Data[index] * depthInfo.rawValueToMeters;If the data format was set to "float32", the data could be accessed similarly (note that the only difference is that the data buffer is interpreted as containing float32s):
const float32Data = new Float32Array(depthInfo.data);
const index = c + r * depthInfo.width;
const depthInMetres = float32Data[index] * depthInfo.rawValueToMeters;The above examples obtain depth in meters values at (c, r) depth buffer coordinates - in order to convert them to normalized view coordinates (to match the behavior getDepthInMeters(x, y) method), the application can perform the following steps:
// Normalize depth buffer coordinates (c, r) to range [0...1]:
const normDepthBufferCoordinates = [c / depthInfo.width,
r / depthInfo.height,
0.0,
1.0];
const normViewFromNormDepthBuffer = depthInfo.normDepthBufferFromNormView.inverse.matrix;
// Transform to normalized view coordinates (with the origin in upper left corner of the screen),
// using your favorite matrix multiplication library:
const normalizedViewCoordinates = normViewFromNormDepthBuffer * normDepthBufferCoordinates;
// The above can also be denormalized to obtain absolute coordinates using viewport dimensions:
const viewCoordinates = [normalizedViewCoordinates[0] * viewport.width,
normalizedViewCoordinates[1] * viewport.height];Note: XRFRame's getDepthInformation() method will only return a result if the depth API was configured with mode set to "cpu-optimized".
"gpu-optimized"usage mode:
const view = ...; // Obtained from a viewer pose.
const xrWebGLBinding = ...; // XRWebGLBinding created for the current session and GL context
const depthInfo = xrWebGLBinding.getDepthInformation(view);
// Grab the information from the XRDepthInformation interface:
const uvTransform = depthInfo.normDepthBufferFromNormView.matrix;
const program = ...; // Linked WebGLProgam program.
const u_DepthTextureLocation = gl.getUniformLocation(program, "u_DepthTexture");
const u_UVTransformLocation = gl.getUniformLocation(program, "u_UVTransform");
const u_RawValueToMeters = gl.getUniformLocation(program, "u_RawValueToMeters");
gl.bindTexture(gl.TEXTURE_2D, depthInfo.texture);
// Subsequently, we need to activate the texture unit (in this case, unit 0),
// and set depth texture sampler to 0:
gl.activeTexture(gl.TEXTURE0);
gl.uniform1i(u_DepthTextureLocation, 0);
// In addition, the UV transform is necessary to correctly index into the depth map:
gl.uniformMatrix4fv(u_UVTransformLocation, false,
uvTransform);
// ... and we also need to send the scaling factor to convert from the raw number to meters:
gl.uniform1f(u_RawValueToMeters, depthInfo.rawValueToMeters);The depth data available to the WebGL shaders will then be packed into luminance and alpha components of the texels.
In order to access the data in the shader, assuming the texture was bound to a texture unit as above, the applications can then use for example fragment shader. The below code assumes that "luminance-alpha" was configured as the data format:
precision mediump float;
uniform sampler2D u_DepthTexture;
uniform mat4 u_UVTransform;
uniform float u_RawValueToMeters;
varying vec2 v_TexCoord; // Computed in vertex shader, based on vertex attributes.
float getDepth(in sampler2D depth_texture, in vec2 uv_coord) {
// Depth is packed into the luminance and alpha components of its texture.
// The texture is a normalized format, storing millimeters.
vec2 packedDepth = texture2D(depth_texture, uv_coord).ra;
return dot(packedDepth, vec2(255.0, 256.0 * 255.0)) * u_RawValueToMeters;
}
void main(void) {
vec2 texCoord = (u_UVTransform * vec4(v_TexCoord.xy, 0, 1)).xy;
float depthInMeters = getDepth(u_DepthTexture, texCoord);
gl_FragColor = ...;
}Note: XRWebGLBinding's getDepthInformation() method will only return a result if the depth API was configured with mode set to "gpu-optimized". Also note that it is possible for the application to configure the depth API using a data format that cannot be uploaded to the GPU with the provided binding (for example, "float32" data format on a WebGL1 context) - in this case, the call to XRWebGLBinding.getDepthInformation() should fail.
The returned depth value is a distance from the camera plane to the observed real-world geometry, at a given coordinate of the depth image. See below image for more details - the depth value at point a corresponds to the distance of point A from depth image plane (specifically, it is not the length of vector aA):
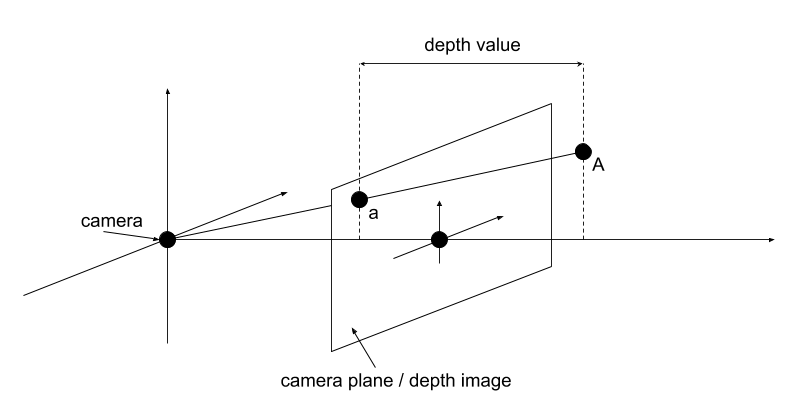
let depthValueInMeters = depthInfo.getDepthInMeters(x, y);
// Where x, y - image coordinates of point a.The comments are left in place to provide additional context on the API to the readers of the IDL and should also be repeated in the explainer text above.
enum XRDepthUsage {
"cpu-optimized",
"gpu-optimized"
};
enum XRDepthDataFormat {
// Has to be supported everywhere:
"luminance-alpha", // internal_format = LUMINANCE_ALPHA, type = UNSIGNED_BYTE,
// 2 bytes per pixel, unpack via dot([R, A], [255.0, 256*255.0])
// Other formats do not have to be supported by the user agents:
"float32", // internal_format = R32F, type = FLOAT
};
// At session creation, the depth sensing API needs to be configured
// with the desired usage and data format. The user agent will first select
// the lowest-indexed depth sensing usage that it supports, and then attempt
// to select the lowest-indexed depth data format. If the user agent is
// unable to select usage and data format that it supports, the depth sensing
// will not be enabled on a session - for sessions where depth sensing is
// listed as required feature, the session creation will fail.
dictionary XRDepthStateInit {
sequence<XRDepthUsage> usagePreference;
sequence<XRDepthDataFormat> dataFormatPreference;
};
partial dictionary XRSessionInit {
XRDepthStateInit? depthSensing;
};
partial interface XRSession {
// Non-null iff depth-sensing is enabled:
readonly attribute XRDepthUsage? depthUsage;
readonly attribute XRDepthDataFormat? depthDataFormat;
};
partial interface XRFrame {
// Must succeed when the depth API was initialized as "cpu-optimized". Otherwise, must throw.
// Returns null if the view does not have a corresponding depth buffer.
XRCPUDepthInformation? getDepthInformation(XRView view);
};
partial interface XRWebGLBinding {
// Must succeed when the depth API was initialized as "gpu-optimized". Otherwise, must throw.
// Returns null if the view does not have a corresponding depth buffer.
XRWebGLDepthInformation? getDepthInformation(XRView view);
};
[SecureContext, Exposed=Window]
interface XRDepthInformation {
// All methods / attributes are accessible only when the frame
// that the depth information originated from is active and animated.
readonly attribute unsigned long width;
readonly attribute unsigned long height;
[SameObject] readonly attribute XRRigidTransform normTextureFromNormView;
readonly attribute float rawValueToMeters;
};
interface XRCPUDepthInformation : XRDepthInformation {
// Data format is determined by session's depthDataFormat attribute.
[SameObject] readonly attribute ArrayBuffer data;
float getDepthInMeters(unsigned long column, unsigned long row);
};
interface XRWebGLDepthInformation : XRDepthInformation {
// Opaque texture, its format is determined by session's depthDataFormat attribute.
[SameObject] readonly attribute WebGLTexture texture;
};Existing or planned native APIs that should be compatible with the API shape proposed above:
- ARKit’s Depth API
https://developer.apple.com/documentation/arkit/ardepthdata
- ARCore Depth API
https://developers.google.com/ar/develop/java/depth/overview
https://developers.google.com/ar/reference/c/group/frame#arframe_acquiredepthimage
It is TBD how the Depth API could be implemented for other devices. For devices / runtimes that provide more detailed world mesh information, the Depth API implementation could leverage the world mesh and synthesize the depth data out of it. Alternatively, there may be ways of accessing the depth data directly (see for example: https://docs.microsoft.com/en-us/windows/mixed-reality/research-mode).