简单的C/S通信模型(accept阻塞的话,就只能一个客户端接进来)
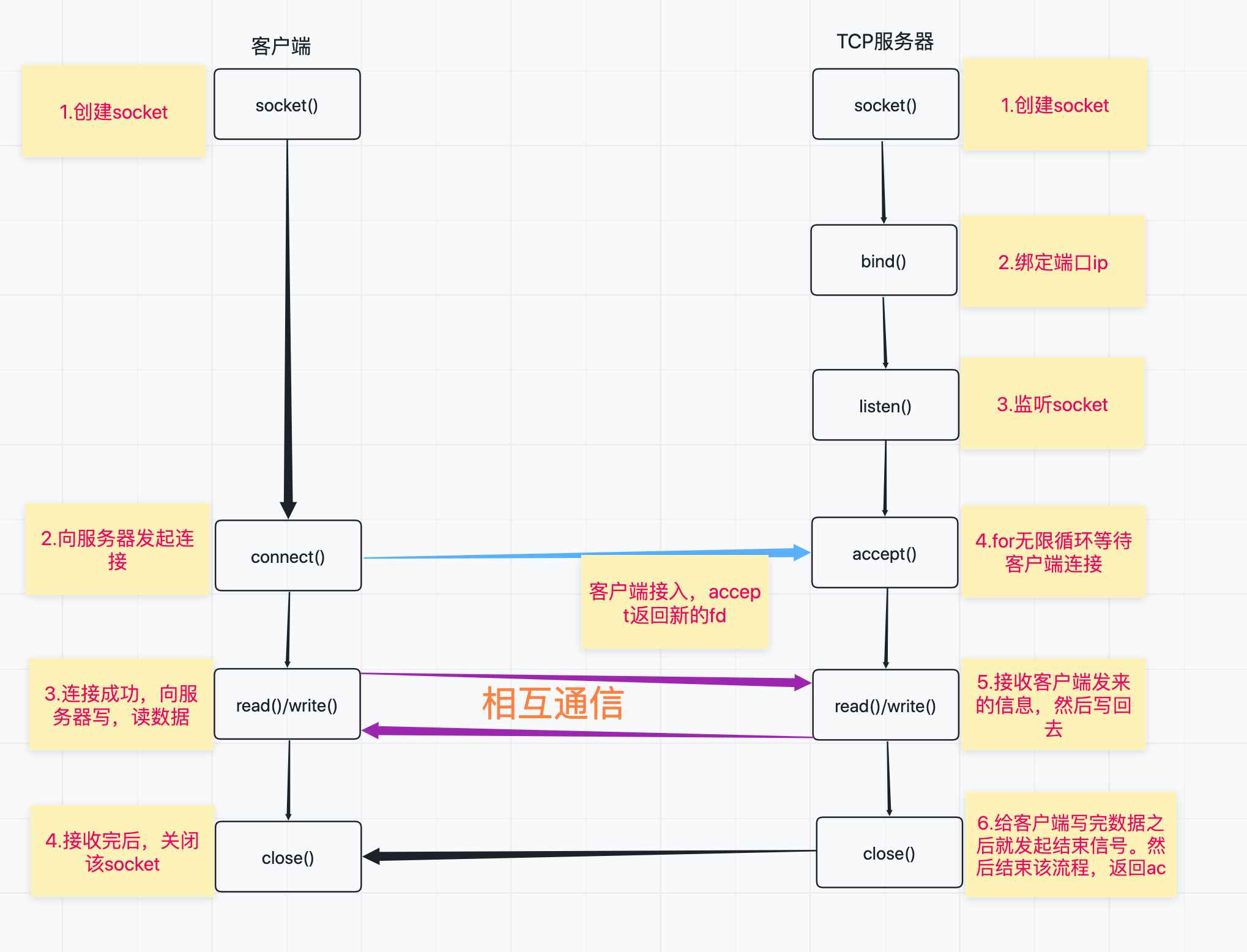
socket()函数
//函数原型。返回:若是成功则为非负数,如出错则为 -1
int socket(int domin, int type, int protocol);
//调用 参数1:使用多少位地址AF_INET 为32,参数2:数据报的类型。 参数3:TCP/UDP 协议
int clientfd = socket(AF_INET, SOCK_STREAM, 0);connect() 函数,用来向服务器建立连接
//函数原型。 返回:成功为 0, 出错为 -1
int connect(int clientfd, const struct sockaddr *addr, socklen_t addrlen );bind()函数,绑定地址
//函数原型 返回:成功为 0,出错为 -1
int bind(int, const struct sockaddr *, socklen_t) __DARWIN_ALIAS(bind);
//使用:
struct sockaddr_in _addr;
_addr.sin_family = AF_INET;
_addr.sin_port = htons(8888);
_addr.sin_addr.s_addr = INADDR_ANY;
bind(sockfd, (sockaddr *)&_addr, sizeof(_addr) );listen() 函数,将sock从一个主动套接字转为一个监听套接字
//函数原型,返回一个非负数的连接描述符
int listen(int sockfd, int backlog);accept()函数,等待来自客户端的连接请求,到达监听描述符,然后在adr中填写客户端的套接字地址,并返回一个已连接描述符
int accept(int listenfd, struct sockaddr *addr, int *addrlen);一个类似以上模型的小故事:

#include <netinet/tcp.h>
#include <arpa/inet.h>
#include <errno.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
using namespace std;
int main()
{
int sockfd = socket(AF_INET, SOCK_STREAM, 0);//创建socket
struct sockaddr_in _addr;
_addr.sin_family = AF_INET;
_addr.sin_port = htons(8888);
_addr.sin_addr.s_addr = INADDR_ANY;
socklen_t socklen = sizeof(_addr);
bind(sockfd, (sockaddr *)&_addr, socklen );
int listenfd = listen(sockfd, 0);
struct sockaddr_in clientAddr;
socklen_t clientlen = sizeof(clientAddr);
for (;;){
int client_sockfd = accept(sockfd,(sockaddr *)&clientAddr, &clientlen);
char buffer[1024] = {0};
//等待用户发信息
ssize_t len_recv = recv(client_sockfd,buffer,1024,0);
//不做错误处理
printf("Recv:%s, %d Bytes\n", buffer, len_recv);
//给用户发信息
send(client_sockfd,buffer,len_recv,0);
//关闭这个连接
close(client_sockfd);
}
close(sockfd);
return 0;
}socket 五元组标识 :<客户端地址,客户端端口,服务器地址,服务器端口,使用的协议tcp/udp>,五元组中的任何一个元素发生变化都表示一个新的客户端socket连接。
网络IO会涉及到两个系统对象,一个是用户空间调用IO的进程或线程,另一个是内核空间的内核系统,比如发生IO操作read时,它会经历两个阶段:
- 等待数据准备就绪(数据准备)
- 将数据从内核拷贝到进程或者线程中。(数据读写)
因为在以上两个阶段上各有不同的情况,所以出现了多种网络IO模型
阻塞,非阻塞,同步,异步


当用户进程调用了read系统函数,内核就开始第一阶段数据的准备。对于网路IO来说,很多时候数据在一开始还没有到达(比如,还没有收到一个完整的数据包),这个时候 内核 就要等待足够的数据到来。而在用户进程这边,整个进程会被阻塞(数据一直没准备好,就会一直空占CPU)。当 内核一直等到数据准备好了,它就会将数据从 内核 中拷贝到用户内存,然后 内核 返回结果,用户进程才解除 阻塞 的状态,重新运行起来。

从上图可以看出,应用进程调用了read函数之后,立刻就有结果返回,这个结果给用户判断结果是个error时,它就知道数据没有准备好,于是它再次发送read函数。直到内核中的数据准备好,并且又再次收到用户进程的system call,那么它马上就将数据拷贝到用户内存,然后返回。所以非阻塞模式IO中,用户进程其实就是不断的主动询问内核数据准备好了没有。 recv() 返回值大于0时,表示接受数据完毕,返回值既是接收到的字节数 recv() 返回0,表示连接已正常断开; recv() 返回-1,且errno等于EAGAIN,表示recv操作还没执行完成;如果errno不等于EAGAIN,表示recv操作遇到系统错误errno 设置非阻塞: fcntl( fd, F_SETFL, O_NONBLOCK ); 不推荐使用,因为循环调用read(),会占用大量资源
当用户进程调用了 select,那么整个进程会被 block,而同时,kernel 会“监视”所 有 select 负责的 socket,当任何一个 socket 中的数据准备好了,select 就会返回。这个时候用户进程再调用 read 操作,将数据从 kernel 拷贝到用户进程。这个图和 blocking IO 的图其实并没有太大的不同,事实上还更差一些。因为这里需要使用两个系统调用(select 和 read),而 blocking IO 只调用了一个系统调用(read)。但是使用 select 以后最大的优势是用户可以在一个线程内同时处理多个 socket 的 IO 请求。用户可以注册多个 socket,然后不断地调用 select 读取被激活的 socket,即可达到在同一个线程内同时处理多个 IO 请求的目的。而在同步阻塞模型中,必须通过多线程的方式才能达到这个目的。(所以,如果处理的连接数不是很高的话,使用select/epoll 的 web server 不一定比使用 multi-threading + blocking IO 的 web server 性能更好,可能延迟还更大。select/epoll 的优势并不是对于单个连接能处理得更快,而是在于能处理更多的连接。)

内核在第一阶段是异步,在第二个阶段是同步;于非阻塞IO的区别在于它提供了消息通知机制,不需要用户进程不断的轮询检查,减少了系统API的调用次数,提高效率


struct aiocb { int aio_fildes off_t aio_offset volatile void *aio_buf size_t aio_nbytes int aio_reqprio struct sigevent aio_sigevent int aio_lio_opcode }用户进程发起 read 操作之后,立刻就可以开始去做其它的事。而另一方面,从 kernel的角度,当它受到一个 asynchronous read 之后,首先它会立刻返回,所以不会对用户进程产生任何 block。然后,kernel 会等待数据准备完成,然后将数据拷贝到用户内存,当这一切都完成之后,kernel 会给用户进程发送一个 signal,告诉它 read 操作完成了。
总结:经上面的介绍,会发现non-blocking IO 和asynchronous IO的区别还是很明显的。在non-blocking IO中,虽然进程大部分时间都不会被block,但是它仍然要求进程主动的check,并且当数据准备完成以后,也需要进程主动的再次调用recvfrom来将数据拷贝到用户内存。 而asynchronous IO则完全不同。它就像是用户进程将整个IO操作都交给了内核去完成,然后内核做完后发信号通知。在此期间,用户进程不需要去检查IO操作的状态,也不需要主动的去拷贝数据。
原文作者:CID( ͡ _ ͡°)