diff --git a/README.md b/README.md
index f3d1ba3..a3b5b00 100755
--- a/README.md
+++ b/README.md
@@ -4,28 +4,32 @@

-This repository represents Ultralytics open-source research into future object detection methods, and incorporates our lessons learned and best practices evolved over training thousands of models on custom client datasets with our previous YOLO repository https://github.com/ultralytics/yolov3. **All code and models are under active development, and are subject to modification or deletion without notice.** Use at your own risk.
+This repository represents Ultralytics open-source research into future object detection methods, and incorporates lessons learned and best practices evolved over thousands of hours of training and evolution on anonymized client datasets. **All code and models are under active development, and are subject to modification or deletion without notice.** Use at your own risk.
-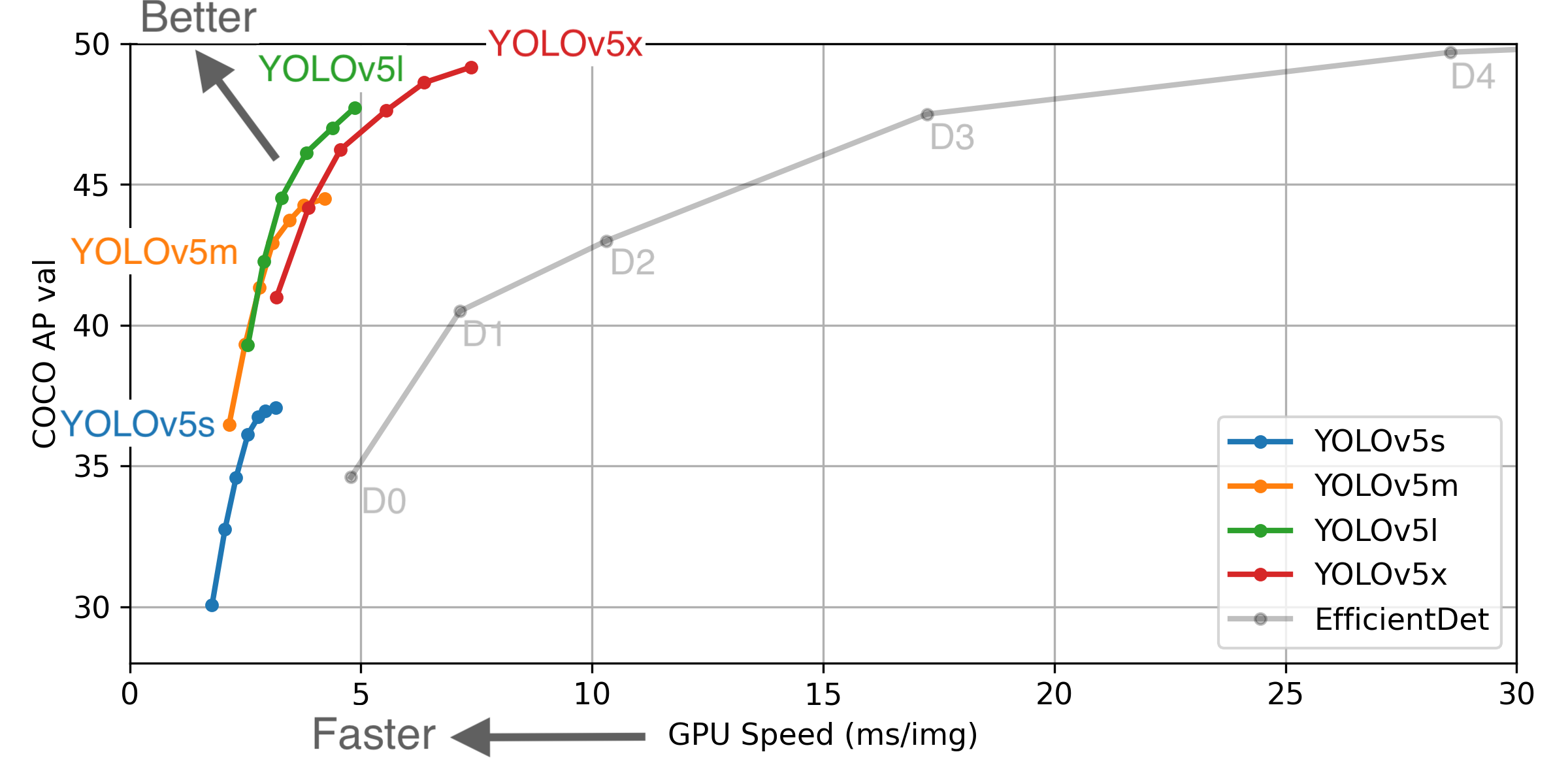 ** GPU Speed measures end-to-end time per image averaged over 5000 COCO val2017 images using a V100 GPU with batch size 32, and includes image preprocessing, PyTorch FP16 inference, postprocessing and NMS. EfficientDet data from [google/automl](https://github.com/google/automl) at batch size 8.
+
** GPU Speed measures end-to-end time per image averaged over 5000 COCO val2017 images using a V100 GPU with batch size 32, and includes image preprocessing, PyTorch FP16 inference, postprocessing and NMS. EfficientDet data from [google/automl](https://github.com/google/automl) at batch size 8.
+ ** GPU Speed measures end-to-end time per image averaged over 5000 COCO val2017 images using a V100 GPU with batch size 32, and includes image preprocessing, PyTorch FP16 inference, postprocessing and NMS. EfficientDet data from [google/automl](https://github.com/google/automl) at batch size 8.
+- **January 5, 2021**: [v4.0 release](https://github.com/ultralytics/yolov5/releases/tag/v4.0): nn.SiLU() activations, [Weights & Biases](https://wandb.ai/) logging, [PyTorch Hub](https://pytorch.org/hub/ultralytics_yolov5/) integration.
- **August 13, 2020**: [v3.0 release](https://github.com/ultralytics/yolov5/releases/tag/v3.0): nn.Hardswish() activations, data autodownload, native AMP.
- **July 23, 2020**: [v2.0 release](https://github.com/ultralytics/yolov5/releases/tag/v2.0): improved model definition, training and mAP.
- **June 22, 2020**: [PANet](https://arxiv.org/abs/1803.01534) updates: new heads, reduced parameters, improved speed and mAP [364fcfd](https://github.com/ultralytics/yolov5/commit/364fcfd7dba53f46edd4f04c037a039c0a287972).
- **June 19, 2020**: [FP16](https://pytorch.org/docs/stable/nn.html#torch.nn.Module.half) as new default for smaller checkpoints and faster inference [d4c6674](https://github.com/ultralytics/yolov5/commit/d4c6674c98e19df4c40e33a777610a18d1961145).
-- **June 9, 2020**: [CSP](https://github.com/WongKinYiu/CrossStagePartialNetworks) updates: improved speed, size, and accuracy (credit to @WongKinYiu for CSP).
-- **May 27, 2020**: Public release. YOLOv5 models are SOTA among all known YOLO implementations.
## Pretrained Checkpoints
-| Model | APval | APtest | AP50 | SpeedGPU | FPSGPU || params | GFLOPS |
-|---------- |------ |------ |------ | -------- | ------| ------ |------ | :------: |
-| [YOLOv5s](https://github.com/ultralytics/yolov5/releases) | 37.0 | 37.0 | 56.2 | **2.4ms** | **416** || 7.5M | 17.5
-| [YOLOv5m](https://github.com/ultralytics/yolov5/releases) | 44.3 | 44.3 | 63.2 | 3.4ms | 294 || 21.8M | 52.3
-| [YOLOv5l](https://github.com/ultralytics/yolov5/releases) | 47.7 | 47.7 | 66.5 | 4.4ms | 227 || 47.8M | 117.2
-| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) | **49.2** | **49.2** | **67.7** | 6.9ms | 145 || 89.0M | 221.5
-| | | | | | || |
-| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) + TTA|**50.8**| **50.8** | **68.9** | 25.5ms | 39 || 89.0M | 801.0
+| Model | size | APval | APtest | AP50 | SpeedV100 | FPSV100 || params | GFLOPS |
+|---------- |------ |------ |------ |------ | -------- | ------| ------ |------ | :------: |
+| [YOLOv5s](https://github.com/ultralytics/yolov5/releases) |640 |36.8 |36.8 |55.6 |**2.2ms** |**455** ||7.3M |17.0
+| [YOLOv5m](https://github.com/ultralytics/yolov5/releases) |640 |44.5 |44.5 |63.1 |2.9ms |345 ||21.4M |51.3
+| [YOLOv5l](https://github.com/ultralytics/yolov5/releases) |640 |48.1 |48.1 |66.4 |3.8ms |264 ||47.0M |115.4
+| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) |640 |**50.1** |**50.1** |**68.7** |6.0ms |167 ||87.7M |218.8
+| | | | | | | || |
+| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) + TTA |832 |**51.9** |**51.9** |**69.6** |24.9ms |40 ||87.7M |1005.3
+
+
** APtest denotes COCO [test-dev2017](http://cocodataset.org/#upload) server results, all other AP results denote val2017 accuracy.
** All AP numbers are for single-model single-scale without ensemble or TTA. **Reproduce mAP** by `python test.py --data coco.yaml --img 640 --conf 0.001 --iou 0.65`
@@ -33,6 +37,7 @@ This repository represents Ultralytics open-source research into future object d
** All checkpoints are trained to 300 epochs with default settings and hyperparameters (no autoaugmentation).
** Test Time Augmentation ([TTA](https://github.com/ultralytics/yolov5/issues/303)) runs at 3 image sizes. **Reproduce TTA** by `python test.py --data coco.yaml --img 832 --iou 0.65 --augment`
+
## Requirements
Python 3.8 or later with all [requirements.txt](https://github.com/ultralytics/yolov5/blob/master/requirements.txt) dependencies installed, including `torch>=1.7`. To install run:
@@ -106,7 +111,7 @@ import torch
from PIL import Image
# Model
-model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True) # for PIL/cv2/np inputs and NMS
+model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)
# Images
img1 = Image.open('zidane.jpg')
@@ -114,13 +119,13 @@ img2 = Image.open('bus.jpg')
imgs = [img1, img2] # batched list of images
# Inference
-prediction = model(imgs, size=640) # includes NMS
+result = model(imgs)
```
## Training
-Download [COCO](https://github.com/ultralytics/yolov5/blob/master/data/scripts/get_coco.sh) and run command below. Training times for YOLOv5s/m/l/x are 2/4/6/8 days on a single V100 (multi-GPU times faster). Use the largest `--batch-size` your GPU allows (batch sizes shown for 16 GB devices).
+Run commands below to reproduce results on [COCO](https://github.com/ultralytics/yolov5/blob/master/data/scripts/get_coco.sh) dataset (dataset auto-downloads on first use). Training times for YOLOv5s/m/l/x are 2/4/6/8 days on a single V100 (multi-GPU times faster). Use the largest `--batch-size` your GPU allows (batch sizes shown for 16 GB devices).
```bash
$ python train.py --data coco.yaml --cfg yolov5s.yaml --weights '' --batch-size 64
yolov5m 40
diff --git a/data/coco.yaml b/data/coco.yaml
index 09f3a78..b9da2bf 100644
--- a/data/coco.yaml
+++ b/data/coco.yaml
@@ -18,15 +18,15 @@ test: ../coco/test-dev2017.txt # 20288 of 40670 images, submit to https://compe
nc: 80
# class names
-names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush']
+names: [ 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
+ 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
+ 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
+ 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
+ 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
+ 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
+ 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
+ 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
+ 'hair drier', 'toothbrush' ]
# Print classes
# with open('data/coco.yaml') as f:
diff --git a/data/coco128.yaml b/data/coco128.yaml
index 12e1d79..c41bccf 100644
--- a/data/coco128.yaml
+++ b/data/coco128.yaml
@@ -17,12 +17,12 @@ val: ../coco128/images/train2017/ # 128 images
nc: 80
# class names
-names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush']
+names: [ 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
+ 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
+ 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
+ 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
+ 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
+ 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
+ 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
+ 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
+ 'hair drier', 'toothbrush' ]
diff --git a/data/voc.yaml b/data/voc.yaml
index b93f6a0..851a9e0 100644
--- a/data/voc.yaml
+++ b/data/voc.yaml
@@ -17,5 +17,5 @@ val: ../VOC/images/val/ # 4952 images
nc: 20
# class names
-names: ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable', 'dog',
- 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor']
+names: [ 'aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable', 'dog',
+ 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor' ]
diff --git a/models/common.py b/models/common.py
index 17b9f01..a25707f 100644
--- a/models/common.py
+++ b/models/common.py
@@ -30,7 +30,7 @@ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, k
super(Conv, self).__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
self.bn = nn.BatchNorm2d(c2)
- self.act = nn.Hardswish() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
def forward(self, x):
return self.act(self.bn(self.conv(x)))
@@ -105,9 +105,39 @@ class Focus(nn.Module):
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super(Focus, self).__init__()
self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
+ # return self.conv(self.contract(x))
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert (H / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, C, H // s, s, W // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(N, C * s * s, H // s, W // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, s, s, C // s ** 2, H, W) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(N, C // s ** 2, H * s, W * s) # x(1,16,160,160)
class Concat(nn.Module):
@@ -253,20 +283,13 @@ def tolist(self):
return x
-class Flatten(nn.Module):
- # Use after nn.AdaptiveAvgPool2d(1) to remove last 2 dimensions
- @staticmethod
- def forward(x):
- return x.view(x.size(0), -1)
-
-
class Classify(nn.Module):
# Classification head, i.e. x(b,c1,20,20) to x(b,c2)
def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
super(Classify, self).__init__()
self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1)
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1)
- self.flat = Flatten()
+ self.flat = nn.Flatten()
def forward(self, x):
z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list
diff --git a/models/experimental.py b/models/experimental.py
index 136e86d..2dbbf7f 100644
--- a/models/experimental.py
+++ b/models/experimental.py
@@ -105,8 +105,8 @@ def forward(self, x, augment=False):
for module in self:
y.append(module(x, augment)[0])
# y = torch.stack(y).max(0)[0] # max ensemble
- # y = torch.cat(y, 1) # nms ensemble
- y = torch.stack(y).mean(0) # mean ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
return y, None # inference, train output
diff --git a/models/hub/anchors.yaml b/models/hub/anchors.yaml
new file mode 100644
index 0000000..a07a4dc
--- /dev/null
+++ b/models/hub/anchors.yaml
@@ -0,0 +1,58 @@
+# Default YOLOv5 anchors for COCO data
+
+
+# P5 -------------------------------------------------------------------------------------------------------------------
+# P5-640:
+anchors_p5_640:
+ - [ 10,13, 16,30, 33,23 ] # P3/8
+ - [ 30,61, 62,45, 59,119 ] # P4/16
+ - [ 116,90, 156,198, 373,326 ] # P5/32
+
+
+# P6 -------------------------------------------------------------------------------------------------------------------
+# P6-640: thr=0.25: 0.9964 BPR, 5.54 anchors past thr, n=12, img_size=640, metric_all=0.281/0.716-mean/best, past_thr=0.469-mean: 9,11, 21,19, 17,41, 43,32, 39,70, 86,64, 65,131, 134,130, 120,265, 282,180, 247,354, 512,387
+anchors_p6_640:
+ - [ 9,11, 21,19, 17,41 ] # P3/8
+ - [ 43,32, 39,70, 86,64 ] # P4/16
+ - [ 65,131, 134,130, 120,265 ] # P5/32
+ - [ 282,180, 247,354, 512,387 ] # P6/64
+
+# P6-1280: thr=0.25: 0.9950 BPR, 5.55 anchors past thr, n=12, img_size=1280, metric_all=0.281/0.714-mean/best, past_thr=0.468-mean: 19,27, 44,40, 38,94, 96,68, 86,152, 180,137, 140,301, 303,264, 238,542, 436,615, 739,380, 925,792
+anchors_p6_1280:
+ - [ 19,27, 44,40, 38,94 ] # P3/8
+ - [ 96,68, 86,152, 180,137 ] # P4/16
+ - [ 140,301, 303,264, 238,542 ] # P5/32
+ - [ 436,615, 739,380, 925,792 ] # P6/64
+
+# P6-1920: thr=0.25: 0.9950 BPR, 5.55 anchors past thr, n=12, img_size=1920, metric_all=0.281/0.714-mean/best, past_thr=0.468-mean: 28,41, 67,59, 57,141, 144,103, 129,227, 270,205, 209,452, 455,396, 358,812, 653,922, 1109,570, 1387,1187
+anchors_p6_1920:
+ - [ 28,41, 67,59, 57,141 ] # P3/8
+ - [ 144,103, 129,227, 270,205 ] # P4/16
+ - [ 209,452, 455,396, 358,812 ] # P5/32
+ - [ 653,922, 1109,570, 1387,1187 ] # P6/64
+
+
+# P7 -------------------------------------------------------------------------------------------------------------------
+# P7-640: thr=0.25: 0.9962 BPR, 6.76 anchors past thr, n=15, img_size=640, metric_all=0.275/0.733-mean/best, past_thr=0.466-mean: 11,11, 13,30, 29,20, 30,46, 61,38, 39,92, 78,80, 146,66, 79,163, 149,150, 321,143, 157,303, 257,402, 359,290, 524,372
+anchors_p7_640:
+ - [ 11,11, 13,30, 29,20 ] # P3/8
+ - [ 30,46, 61,38, 39,92 ] # P4/16
+ - [ 78,80, 146,66, 79,163 ] # P5/32
+ - [ 149,150, 321,143, 157,303 ] # P6/64
+ - [ 257,402, 359,290, 524,372 ] # P7/128
+
+# P7-1280: thr=0.25: 0.9968 BPR, 6.71 anchors past thr, n=15, img_size=1280, metric_all=0.273/0.732-mean/best, past_thr=0.463-mean: 19,22, 54,36, 32,77, 70,83, 138,71, 75,173, 165,159, 148,334, 375,151, 334,317, 251,626, 499,474, 750,326, 534,814, 1079,818
+anchors_p7_1280:
+ - [ 19,22, 54,36, 32,77 ] # P3/8
+ - [ 70,83, 138,71, 75,173 ] # P4/16
+ - [ 165,159, 148,334, 375,151 ] # P5/32
+ - [ 334,317, 251,626, 499,474 ] # P6/64
+ - [ 750,326, 534,814, 1079,818 ] # P7/128
+
+# P7-1920: thr=0.25: 0.9968 BPR, 6.71 anchors past thr, n=15, img_size=1920, metric_all=0.273/0.732-mean/best, past_thr=0.463-mean: 29,34, 81,55, 47,115, 105,124, 207,107, 113,259, 247,238, 222,500, 563,227, 501,476, 376,939, 749,711, 1126,489, 801,1222, 1618,1227
+anchors_p7_1920:
+ - [ 29,34, 81,55, 47,115 ] # P3/8
+ - [ 105,124, 207,107, 113,259 ] # P4/16
+ - [ 247,238, 222,500, 563,227 ] # P5/32
+ - [ 501,476, 376,939, 749,711 ] # P6/64
+ - [ 1126,489, 801,1222, 1618,1227 ] # P7/128
diff --git a/models/hub/yolov5-p2.yaml b/models/hub/yolov5-p2.yaml
new file mode 100644
index 0000000..0633a90
--- /dev/null
+++ b/models/hub/yolov5-p2.yaml
@@ -0,0 +1,54 @@
+# parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors: 3
+
+# YOLOv5 backbone
+backbone:
+ # [from, number, module, args]
+ [ [ -1, 1, Focus, [ 64, 3 ] ], # 0-P1/2
+ [ -1, 1, Conv, [ 128, 3, 2 ] ], # 1-P2/4
+ [ -1, 3, C3, [ 128 ] ],
+ [ -1, 1, Conv, [ 256, 3, 2 ] ], # 3-P3/8
+ [ -1, 9, C3, [ 256 ] ],
+ [ -1, 1, Conv, [ 512, 3, 2 ] ], # 5-P4/16
+ [ -1, 9, C3, [ 512 ] ],
+ [ -1, 1, Conv, [ 1024, 3, 2 ] ], # 7-P5/32
+ [ -1, 1, SPP, [ 1024, [ 5, 9, 13 ] ] ],
+ [ -1, 3, C3, [ 1024, False ] ], # 9
+ ]
+
+# YOLOv5 head
+head:
+ [ [ -1, 1, Conv, [ 512, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4
+ [ -1, 3, C3, [ 512, False ] ], # 13
+
+ [ -1, 1, Conv, [ 256, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P3
+ [ -1, 3, C3, [ 256, False ] ], # 17 (P3/8-small)
+
+ [ -1, 1, Conv, [ 128, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 2 ], 1, Concat, [ 1 ] ], # cat backbone P2
+ [ -1, 1, C3, [ 128, False ] ], # 21 (P2/4-xsmall)
+
+ [ -1, 1, Conv, [ 128, 3, 2 ] ],
+ [ [ -1, 18 ], 1, Concat, [ 1 ] ], # cat head P3
+ [ -1, 3, C3, [ 256, False ] ], # 24 (P3/8-small)
+
+ [ -1, 1, Conv, [ 256, 3, 2 ] ],
+ [ [ -1, 14 ], 1, Concat, [ 1 ] ], # cat head P4
+ [ -1, 3, C3, [ 512, False ] ], # 27 (P4/16-medium)
+
+ [ -1, 1, Conv, [ 512, 3, 2 ] ],
+ [ [ -1, 10 ], 1, Concat, [ 1 ] ], # cat head P5
+ [ -1, 3, C3, [ 1024, False ] ], # 30 (P5/32-large)
+
+ [ [ 24, 27, 30 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4, P5)
+ ]
diff --git a/models/hub/yolov5-p6.yaml b/models/hub/yolov5-p6.yaml
new file mode 100644
index 0000000..3728a11
--- /dev/null
+++ b/models/hub/yolov5-p6.yaml
@@ -0,0 +1,56 @@
+# parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors: 3
+
+# YOLOv5 backbone
+backbone:
+ # [from, number, module, args]
+ [ [ -1, 1, Focus, [ 64, 3 ] ], # 0-P1/2
+ [ -1, 1, Conv, [ 128, 3, 2 ] ], # 1-P2/4
+ [ -1, 3, C3, [ 128 ] ],
+ [ -1, 1, Conv, [ 256, 3, 2 ] ], # 3-P3/8
+ [ -1, 9, C3, [ 256 ] ],
+ [ -1, 1, Conv, [ 512, 3, 2 ] ], # 5-P4/16
+ [ -1, 9, C3, [ 512 ] ],
+ [ -1, 1, Conv, [ 768, 3, 2 ] ], # 7-P5/32
+ [ -1, 3, C3, [ 768 ] ],
+ [ -1, 1, Conv, [ 1024, 3, 2 ] ], # 9-P6/64
+ [ -1, 1, SPP, [ 1024, [ 3, 5, 7 ] ] ],
+ [ -1, 3, C3, [ 1024, False ] ], # 11
+ ]
+
+# YOLOv5 head
+head:
+ [ [ -1, 1, Conv, [ 768, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 8 ], 1, Concat, [ 1 ] ], # cat backbone P5
+ [ -1, 3, C3, [ 768, False ] ], # 15
+
+ [ -1, 1, Conv, [ 512, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4
+ [ -1, 3, C3, [ 512, False ] ], # 19
+
+ [ -1, 1, Conv, [ 256, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P3
+ [ -1, 3, C3, [ 256, False ] ], # 23 (P3/8-small)
+
+ [ -1, 1, Conv, [ 256, 3, 2 ] ],
+ [ [ -1, 20 ], 1, Concat, [ 1 ] ], # cat head P4
+ [ -1, 3, C3, [ 512, False ] ], # 26 (P4/16-medium)
+
+ [ -1, 1, Conv, [ 512, 3, 2 ] ],
+ [ [ -1, 16 ], 1, Concat, [ 1 ] ], # cat head P5
+ [ -1, 3, C3, [ 768, False ] ], # 29 (P5/32-large)
+
+ [ -1, 1, Conv, [ 768, 3, 2 ] ],
+ [ [ -1, 12 ], 1, Concat, [ 1 ] ], # cat head P6
+ [ -1, 3, C3, [ 1024, False ] ], # 32 (P5/64-xlarge)
+
+ [ [ 23, 26, 29, 32 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4, P5, P6)
+ ]
diff --git a/models/hub/yolov5-p7.yaml b/models/hub/yolov5-p7.yaml
new file mode 100644
index 0000000..ca8f849
--- /dev/null
+++ b/models/hub/yolov5-p7.yaml
@@ -0,0 +1,67 @@
+# parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors: 3
+
+# YOLOv5 backbone
+backbone:
+ # [from, number, module, args]
+ [ [ -1, 1, Focus, [ 64, 3 ] ], # 0-P1/2
+ [ -1, 1, Conv, [ 128, 3, 2 ] ], # 1-P2/4
+ [ -1, 3, C3, [ 128 ] ],
+ [ -1, 1, Conv, [ 256, 3, 2 ] ], # 3-P3/8
+ [ -1, 9, C3, [ 256 ] ],
+ [ -1, 1, Conv, [ 512, 3, 2 ] ], # 5-P4/16
+ [ -1, 9, C3, [ 512 ] ],
+ [ -1, 1, Conv, [ 768, 3, 2 ] ], # 7-P5/32
+ [ -1, 3, C3, [ 768 ] ],
+ [ -1, 1, Conv, [ 1024, 3, 2 ] ], # 9-P6/64
+ [ -1, 3, C3, [ 1024 ] ],
+ [ -1, 1, Conv, [ 1280, 3, 2 ] ], # 11-P7/128
+ [ -1, 1, SPP, [ 1280, [ 3, 5 ] ] ],
+ [ -1, 3, C3, [ 1280, False ] ], # 13
+ ]
+
+# YOLOv5 head
+head:
+ [ [ -1, 1, Conv, [ 1024, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 10 ], 1, Concat, [ 1 ] ], # cat backbone P6
+ [ -1, 3, C3, [ 1024, False ] ], # 17
+
+ [ -1, 1, Conv, [ 768, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 8 ], 1, Concat, [ 1 ] ], # cat backbone P5
+ [ -1, 3, C3, [ 768, False ] ], # 21
+
+ [ -1, 1, Conv, [ 512, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4
+ [ -1, 3, C3, [ 512, False ] ], # 25
+
+ [ -1, 1, Conv, [ 256, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P3
+ [ -1, 3, C3, [ 256, False ] ], # 29 (P3/8-small)
+
+ [ -1, 1, Conv, [ 256, 3, 2 ] ],
+ [ [ -1, 26 ], 1, Concat, [ 1 ] ], # cat head P4
+ [ -1, 3, C3, [ 512, False ] ], # 32 (P4/16-medium)
+
+ [ -1, 1, Conv, [ 512, 3, 2 ] ],
+ [ [ -1, 22 ], 1, Concat, [ 1 ] ], # cat head P5
+ [ -1, 3, C3, [ 768, False ] ], # 35 (P5/32-large)
+
+ [ -1, 1, Conv, [ 768, 3, 2 ] ],
+ [ [ -1, 18 ], 1, Concat, [ 1 ] ], # cat head P6
+ [ -1, 3, C3, [ 1024, False ] ], # 38 (P6/64-xlarge)
+
+ [ -1, 1, Conv, [ 1024, 3, 2 ] ],
+ [ [ -1, 14 ], 1, Concat, [ 1 ] ], # cat head P7
+ [ -1, 3, C3, [ 1280, False ] ], # 41 (P7/128-xxlarge)
+
+ [ [ 29, 32, 35, 38, 41 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4, P5, P6, P7)
+ ]
diff --git a/models/yolo.py b/models/yolo.py
index b75e939..5dc8b57 100644
--- a/models/yolo.py
+++ b/models/yolo.py
@@ -1,17 +1,13 @@
import argparse
import logging
-import math
import sys
from copy import deepcopy
from pathlib import Path
-import torch
-import torch.nn as nn
-
sys.path.append('./') # to run '$ python *.py' files in subdirectories
logger = logging.getLogger(__name__)
-from models.common import Conv, Bottleneck, SPP, DWConv, Focus, BottleneckCSP, C3, Concat, NMS, autoShape
+from models.common import *
from models.experimental import MixConv2d, CrossConv
from utils.autoanchor import check_anchor_order
from utils.general import make_divisible, check_file, set_logging
@@ -89,7 +85,7 @@ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None): # model, input channels,
# Build strides, anchors
m = self.model[-1] # Detect()
if isinstance(m, Detect):
- s = 128 # 2x min stride
+ s = 256 # 2x min stride
m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
m.anchors /= m.stride.view(-1, 1, 1)
check_anchor_order(m)
@@ -109,7 +105,7 @@ def forward(self, x, augment=False, profile=False):
f = [None, 3, None] # flips (2-ud, 3-lr)
y = [] # outputs
for si, fi in zip(s, f):
- xi = scale_img(x.flip(fi) if fi else x, si)
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
yi = self.forward_once(xi)[0] # forward
# cv2.imwrite('img%g.jpg' % s, 255 * xi[0].numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
yi[..., :4] /= si # de-scale
@@ -242,13 +238,17 @@ def parse_model(d, ch): # model_dict, input_channels(3)
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
- c2 = sum([ch[-1 if x == -1 else x + 1] for x in f])
+ c2 = sum([ch[x if x < 0 else x + 1] for x in f])
elif m is Detect:
args.append([ch[x + 1] for x in f])
if isinstance(args[1], int): # number of anchors
args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is Contract:
+ c2 = ch[f if f < 0 else f + 1] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f if f < 0 else f + 1] // args[0] ** 2
else:
- c2 = ch[f]
+ c2 = ch[f if f < 0 else f + 1]
m_ = nn.Sequential(*[m(*args) for _ in range(n)]) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
diff --git a/models/yolov5l.yaml b/models/yolov5l.yaml
index 1309554..71ebf86 100644
--- a/models/yolov5l.yaml
+++ b/models/yolov5l.yaml
@@ -14,14 +14,14 @@ backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
- [-1, 3, BottleneckCSP, [128]],
+ [-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
- [-1, 9, BottleneckCSP, [256]],
+ [-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
- [-1, 9, BottleneckCSP, [512]],
+ [-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
- [-1, 3, BottleneckCSP, [1024, False]], # 9
+ [-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
@@ -29,20 +29,20 @@ head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
- [-1, 3, BottleneckCSP, [512, False]], # 13
+ [-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
- [-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
+ [-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
- [-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
+ [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
- [-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
+ [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
diff --git a/models/yolov5m.yaml b/models/yolov5m.yaml
index eb50a71..3c749c9 100644
--- a/models/yolov5m.yaml
+++ b/models/yolov5m.yaml
@@ -14,14 +14,14 @@ backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
- [-1, 3, BottleneckCSP, [128]],
+ [-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
- [-1, 9, BottleneckCSP, [256]],
+ [-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
- [-1, 9, BottleneckCSP, [512]],
+ [-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
- [-1, 3, BottleneckCSP, [1024, False]], # 9
+ [-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
@@ -29,20 +29,20 @@ head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
- [-1, 3, BottleneckCSP, [512, False]], # 13
+ [-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
- [-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
+ [-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
- [-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
+ [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
- [-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
+ [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
diff --git a/models/yolov5s.yaml b/models/yolov5s.yaml
index 2bec452..aca669d 100644
--- a/models/yolov5s.yaml
+++ b/models/yolov5s.yaml
@@ -14,14 +14,14 @@ backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
- [-1, 3, BottleneckCSP, [128]],
+ [-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
- [-1, 9, BottleneckCSP, [256]],
+ [-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
- [-1, 9, BottleneckCSP, [512]],
+ [-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
- [-1, 3, BottleneckCSP, [1024, False]], # 9
+ [-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
@@ -29,20 +29,20 @@ head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
- [-1, 3, BottleneckCSP, [512, False]], # 13
+ [-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
- [-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
+ [-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
- [-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
+ [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
- [-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
+ [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
diff --git a/models/yolov5x.yaml b/models/yolov5x.yaml
index 9676402..d3babdf 100644
--- a/models/yolov5x.yaml
+++ b/models/yolov5x.yaml
@@ -14,14 +14,14 @@ backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
- [-1, 3, BottleneckCSP, [128]],
+ [-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
- [-1, 9, BottleneckCSP, [256]],
+ [-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
- [-1, 9, BottleneckCSP, [512]],
+ [-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
- [-1, 3, BottleneckCSP, [1024, False]], # 9
+ [-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
@@ -29,20 +29,20 @@ head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
- [-1, 3, BottleneckCSP, [512, False]], # 13
+ [-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
- [-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
+ [-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
- [-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
+ [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
- [-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
+ [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
diff --git a/train.py b/train.py
index d0f3bdc..d61ca4b 100644
--- a/train.py
+++ b/train.py
@@ -104,6 +104,7 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
nbs = 64 # nominal batch size
accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
+ logger.info(f"Scaled weight_decay = {hyp['weight_decay']}")
pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
for k, v in model.named_modules():
@@ -164,7 +165,8 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
del ckpt, state_dict
# Image sizes
- gs = int(max(model.stride)) # grid size (max stride)
+ gs = int(model.stride.max()) # grid size (max stride)
+ nl = model.model[-1].nl # number of detection layers (used for scaling hyp['obj'])
imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
# DP mode
@@ -187,7 +189,7 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,
hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect, rank=rank,
world_size=opt.world_size, workers=opt.workers,
- image_weights=opt.image_weights)
+ image_weights=opt.image_weights, quad=opt.quad)
mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label class
nb = len(dataloader) # number of batches
assert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)
@@ -214,7 +216,8 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
# Model parameters
- hyp['cls'] *= nc / 80. # scale coco-tuned hyp['cls'] to current dataset
+ hyp['cls'] *= nc / 80. # scale hyp['cls'] to class count
+ hyp['obj'] *= imgsz ** 2 / 640. ** 2 * 3. / nl # scale hyp['obj'] to image size and output layers
model.nc = nc # attach number of classes to model
model.hyp = hyp # attach hyperparameters to model
model.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)
@@ -290,6 +293,8 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
loss, loss_items = compute_loss(pred, targets.to(device), model) # loss scaled by batch_size
if rank != -1:
loss *= opt.world_size # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
# Backward
scaler.scale(loss).backward()
@@ -458,10 +463,10 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
parser.add_argument('--project', default='runs/train', help='save to project/name')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
opt = parser.parse_args()
# Set DDP variables
- opt.total_batch_size = opt.batch_size
opt.world_size = int(os.environ['WORLD_SIZE']) if 'WORLD_SIZE' in os.environ else 1
opt.global_rank = int(os.environ['RANK']) if 'RANK' in os.environ else -1
set_logging(opt.global_rank)
@@ -486,6 +491,7 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok | opt.evolve) # increment run
# DDP mode
+ opt.total_batch_size = opt.batch_size
device = select_device(opt.device, batch_size=opt.batch_size)
if opt.local_rank != -1:
assert torch.cuda.device_count() > opt.local_rank
diff --git a/utils/autoanchor.py b/utils/autoanchor.py
index 0c33dcb..badefc1 100644
--- a/utils/autoanchor.py
+++ b/utils/autoanchor.py
@@ -110,6 +110,7 @@ def print_results(k):
print('WARNING: Extremely small objects found. '
'%g of %g labels are < 3 pixels in width or height.' % (i, len(wh0)))
wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
# Kmeans calculation
print('Running kmeans for %g anchors on %g points...' % (n, len(wh)))
diff --git a/utils/datasets.py b/utils/datasets.py
index e2b139f..9001832 100755
--- a/utils/datasets.py
+++ b/utils/datasets.py
@@ -15,6 +15,7 @@
import cv2
import numpy as np
import torch
+import torch.nn.functional as F
from PIL import Image, ExifTags
from torch.utils.data import Dataset
from tqdm import tqdm
@@ -55,7 +56,7 @@ def exif_size(img):
def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=False, cache=False, pad=0.0, rect=False,
- rank=-1, world_size=1, workers=8, image_weights=False):
+ rank=-1, world_size=1, workers=8, image_weights=False, quad=False):
# Make sure only the first process in DDP process the dataset first, and the following others can use the cache
with torch_distributed_zero_first(rank):
dataset = LoadImagesAndLabels(path, imgsz, batch_size,
@@ -79,7 +80,7 @@ def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=Fa
num_workers=nw,
sampler=sampler,
pin_memory=True,
- collate_fn=LoadImagesAndLabels.collate_fn)
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn)
return dataloader, dataset
@@ -578,6 +579,32 @@ def collate_fn(batch):
l[:, 0] = i # add target image index for build_targets()
return torch.stack(img, 0), torch.cat(label, 0), path, shapes
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0., 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0., 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, .5, .5, .5, .5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2., mode='bilinear', align_corners=False)[
+ 0].type(img[i].type())
+ l = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ img4.append(im)
+ label4.append(l)
+
+ for i, l in enumerate(label4):
+ l[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
+
# Ancillary functions --------------------------------------------------------------------------------------------------
def load_image(self, index):
@@ -617,7 +644,7 @@ def augment_hsv(img, hgain=0.5, sgain=0.5, vgain=0.5):
def load_mosaic(self, index):
- # loads images in a mosaic
+ # loads images in a 4-mosaic
labels4 = []
s = self.img_size
@@ -674,6 +701,80 @@ def load_mosaic(self, index):
return img4, labels4
+def load_mosaic9(self, index):
+ # loads images in a 9-mosaic
+
+ labels9 = []
+ s = self.img_size
+ indices = [index] + [self.indices[random.randint(0, self.n - 1)] for _ in range(8)] # 8 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = [max(x, 0) for x in c] # allocate coords
+
+ # Labels
+ x = self.labels[index]
+ labels = x.copy()
+ if x.size > 0: # Normalized xywh to pixel xyxy format
+ labels[:, 1] = w * (x[:, 1] - x[:, 3] / 2) + padx
+ labels[:, 2] = h * (x[:, 2] - x[:, 4] / 2) + pady
+ labels[:, 3] = w * (x[:, 1] + x[:, 3] / 2) + padx
+ labels[:, 4] = h * (x[:, 2] + x[:, 4] / 2) + pady
+ labels9.append(labels)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = [int(random.uniform(0, s)) for x in self.mosaic_border] # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ if len(labels9):
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+
+ np.clip(labels9[:, 1:], 0, 2 * s, out=labels9[:, 1:]) # use with random_perspective
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ img9, labels9 = random_perspective(img9, labels9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+
def replicate(img, labels):
# Replicate labels
h, w = img.shape[:2]
@@ -811,12 +912,12 @@ def random_perspective(img, targets=(), degrees=10, translate=.1, scale=.1, shea
return img, targets
-def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1): # box1(4,n), box2(4,n)
+def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
# Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
- ar = np.maximum(w2 / (h2 + 1e-16), h2 / (w2 + 1e-16)) # aspect ratio
- return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + 1e-16) > area_thr) & (ar < ar_thr) # candidates
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
def cutout(image, labels):
diff --git a/utils/general.py b/utils/general.py
index fceefb0..797587b 100755
--- a/utils/general.py
+++ b/utils/general.py
@@ -281,6 +281,7 @@ def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=Non
# Settings
min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
time_limit = 10.0 # seconds to quit after
redundant = True # require redundant detections
multi_label = nc > 1 # multiple labels per box (adds 0.5ms/img)
@@ -328,13 +329,12 @@ def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=Non
# if not torch.isfinite(x).all():
# x = x[torch.isfinite(x).all(1)]
- # If none remain process next image
+ # Check shape
n = x.shape[0] # number of boxes
- if not n:
+ if not n: # no boxes
continue
-
- # Sort by confidence
- # x = x[x[:, 4].argsort(descending=True)]
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
# Batched NMS
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
@@ -352,6 +352,7 @@ def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=Non
output[xi] = x[i]
if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
break # time limit exceeded
return output
diff --git a/utils/google_utils.py b/utils/google_utils.py
index f97349d..242270c 100644
--- a/utils/google_utils.py
+++ b/utils/google_utils.py
@@ -6,6 +6,7 @@
import time
from pathlib import Path
+import requests
import torch
@@ -21,21 +22,14 @@ def attempt_download(weights):
file = Path(weights).name.lower()
msg = weights + ' missing, try downloading from https://github.com/ultralytics/yolov5/releases/'
- models = ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt'] # available models
- redundant = False # offer second download option
-
- if file in models and not os.path.isfile(weights):
- # Google Drive
- # d = {'yolov5s.pt': '1R5T6rIyy3lLwgFXNms8whc-387H0tMQO',
- # 'yolov5m.pt': '1vobuEExpWQVpXExsJ2w-Mbf3HJjWkQJr',
- # 'yolov5l.pt': '1hrlqD1Wdei7UT4OgT785BEk1JwnSvNEV',
- # 'yolov5x.pt': '1mM8aZJlWTxOg7BZJvNUMrTnA2AbeCVzS'}
- # r = gdrive_download(id=d[file], name=weights) if file in d else 1
- # if r == 0 and os.path.exists(weights) and os.path.getsize(weights) > 1E6: # check
- # return
+ response = requests.get('https://github.com/gitapi/repos/ultralytics/yolov5/releases/latest').json() # github api
+ assets = [x['name'] for x in response['assets']] # release assets, i.e. ['yolov5s.pt', 'yolov5m.pt', ...]
+ redundant = False # second download option
+ if file in assets and not os.path.isfile(weights):
try: # GitHub
- url = 'https://github.com/ultralytics/yolov5/releases/download/v3.1/' + file
+ tag = response['tag_name'] # i.e. 'v1.0'
+ url = f'https://github.com/ultralytics/yolov5/releases/download/{tag}/{file}'
print('Downloading %s to %s...' % (url, weights))
torch.hub.download_url_to_file(url, weights)
assert os.path.exists(weights) and os.path.getsize(weights) > 1E6 # check
@@ -53,10 +47,9 @@ def attempt_download(weights):
return
-def gdrive_download(id='1uH2BylpFxHKEGXKL6wJJlsgMU2YEjxuc', name='tmp.zip'):
- # Downloads a file from Google Drive. from utils.google_utils import *; gdrive_download()
+def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', name='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov5.utils.google_utils import *; gdrive_download()
t = time.time()
-
print('Downloading https://drive.google.com/uc?export=download&id=%s as %s... ' % (id, name), end='')
os.remove(name) if os.path.exists(name) else None # remove existing
os.remove('cookie') if os.path.exists('cookie') else None
diff --git a/utils/loss.py b/utils/loss.py
index 2049516..46051f2 100644
--- a/utils/loss.py
+++ b/utils/loss.py
@@ -106,7 +106,7 @@ def compute_loss(p, targets, model): # predictions, targets, model
# Losses
nt = 0 # number of targets
no = len(p) # number of outputs
- balance = [4.0, 1.0, 0.4] if no == 3 else [4.0, 1.0, 0.4, 0.1] # P3-5 or P3-6
+ balance = [4.0, 1.0, 0.3, 0.1, 0.03] # P3-P7
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
@@ -140,7 +140,7 @@ def compute_loss(p, targets, model): # predictions, targets, model
s = 3 / no # output count scaling
lbox *= h['box'] * s
- lobj *= h['obj'] * s * (1.4 if no == 4 else 1.)
+ lobj *= h['obj']
lcls *= h['cls'] * s
bs = tobj.shape[0] # batch size
diff --git a/utils/plots.py b/utils/plots.py
index 6b4e301..c883ea2 100644
--- a/utils/plots.py
+++ b/utils/plots.py
@@ -223,7 +223,7 @@ def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
plt.savefig('targets.jpg', dpi=200)
-def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+def plot_study_txt(path='study/', x=None): # from utils.plots import *; plot_study_txt()
# Plot study.txt generated by test.py
fig, ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)
ax = ax.ravel()
@@ -246,7 +246,7 @@ def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_tx
ax2.grid()
ax2.set_xlim(0, 30)
- ax2.set_ylim(28, 50)
+ ax2.set_ylim(29, 51)
ax2.set_yticks(np.arange(30, 55, 5))
ax2.set_xlabel('GPU Speed (ms/img)')
ax2.set_ylabel('COCO AP val')
diff --git a/utils/torch_utils.py b/utils/torch_utils.py
index 69a3121..75bcb7f 100644
--- a/utils/torch_utils.py
+++ b/utils/torch_utils.py
@@ -225,8 +225,8 @@ def load_classifier(name='resnet101', n=2):
return model
-def scale_img(img, ratio=1.0, same_shape=False): # img(16,3,256,416), r=ratio
- # scales img(bs,3,y,x) by ratio
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
if ratio == 1.0:
return img
else:
@@ -234,7 +234,6 @@ def scale_img(img, ratio=1.0, same_shape=False): # img(16,3,256,416), r=ratio
s = (int(h * ratio), int(w * ratio)) # new size
img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
if not same_shape: # pad/crop img
- gs = 32 # (pixels) grid size
h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
** GPU Speed measures end-to-end time per image averaged over 5000 COCO val2017 images using a V100 GPU with batch size 32, and includes image preprocessing, PyTorch FP16 inference, postprocessing and NMS. EfficientDet data from [google/automl](https://github.com/google/automl) at batch size 8.
+- **January 5, 2021**: [v4.0 release](https://github.com/ultralytics/yolov5/releases/tag/v4.0): nn.SiLU() activations, [Weights & Biases](https://wandb.ai/) logging, [PyTorch Hub](https://pytorch.org/hub/ultralytics_yolov5/) integration.
- **August 13, 2020**: [v3.0 release](https://github.com/ultralytics/yolov5/releases/tag/v3.0): nn.Hardswish() activations, data autodownload, native AMP.
- **July 23, 2020**: [v2.0 release](https://github.com/ultralytics/yolov5/releases/tag/v2.0): improved model definition, training and mAP.
- **June 22, 2020**: [PANet](https://arxiv.org/abs/1803.01534) updates: new heads, reduced parameters, improved speed and mAP [364fcfd](https://github.com/ultralytics/yolov5/commit/364fcfd7dba53f46edd4f04c037a039c0a287972).
- **June 19, 2020**: [FP16](https://pytorch.org/docs/stable/nn.html#torch.nn.Module.half) as new default for smaller checkpoints and faster inference [d4c6674](https://github.com/ultralytics/yolov5/commit/d4c6674c98e19df4c40e33a777610a18d1961145).
-- **June 9, 2020**: [CSP](https://github.com/WongKinYiu/CrossStagePartialNetworks) updates: improved speed, size, and accuracy (credit to @WongKinYiu for CSP).
-- **May 27, 2020**: Public release. YOLOv5 models are SOTA among all known YOLO implementations.
## Pretrained Checkpoints
-| Model | APval | APtest | AP50 | SpeedGPU | FPSGPU || params | GFLOPS |
-|---------- |------ |------ |------ | -------- | ------| ------ |------ | :------: |
-| [YOLOv5s](https://github.com/ultralytics/yolov5/releases) | 37.0 | 37.0 | 56.2 | **2.4ms** | **416** || 7.5M | 17.5
-| [YOLOv5m](https://github.com/ultralytics/yolov5/releases) | 44.3 | 44.3 | 63.2 | 3.4ms | 294 || 21.8M | 52.3
-| [YOLOv5l](https://github.com/ultralytics/yolov5/releases) | 47.7 | 47.7 | 66.5 | 4.4ms | 227 || 47.8M | 117.2
-| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) | **49.2** | **49.2** | **67.7** | 6.9ms | 145 || 89.0M | 221.5
-| | | | | | || |
-| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) + TTA|**50.8**| **50.8** | **68.9** | 25.5ms | 39 || 89.0M | 801.0
+| Model | size | APval | APtest | AP50 | SpeedV100 | FPSV100 || params | GFLOPS |
+|---------- |------ |------ |------ |------ | -------- | ------| ------ |------ | :------: |
+| [YOLOv5s](https://github.com/ultralytics/yolov5/releases) |640 |36.8 |36.8 |55.6 |**2.2ms** |**455** ||7.3M |17.0
+| [YOLOv5m](https://github.com/ultralytics/yolov5/releases) |640 |44.5 |44.5 |63.1 |2.9ms |345 ||21.4M |51.3
+| [YOLOv5l](https://github.com/ultralytics/yolov5/releases) |640 |48.1 |48.1 |66.4 |3.8ms |264 ||47.0M |115.4
+| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) |640 |**50.1** |**50.1** |**68.7** |6.0ms |167 ||87.7M |218.8
+| | | | | | | || |
+| [YOLOv5x](https://github.com/ultralytics/yolov5/releases) + TTA |832 |**51.9** |**51.9** |**69.6** |24.9ms |40 ||87.7M |1005.3
+
+
** APtest denotes COCO [test-dev2017](http://cocodataset.org/#upload) server results, all other AP results denote val2017 accuracy.
** All AP numbers are for single-model single-scale without ensemble or TTA. **Reproduce mAP** by `python test.py --data coco.yaml --img 640 --conf 0.001 --iou 0.65`
@@ -33,6 +37,7 @@ This repository represents Ultralytics open-source research into future object d
** All checkpoints are trained to 300 epochs with default settings and hyperparameters (no autoaugmentation).
** Test Time Augmentation ([TTA](https://github.com/ultralytics/yolov5/issues/303)) runs at 3 image sizes. **Reproduce TTA** by `python test.py --data coco.yaml --img 832 --iou 0.65 --augment`
+
## Requirements
Python 3.8 or later with all [requirements.txt](https://github.com/ultralytics/yolov5/blob/master/requirements.txt) dependencies installed, including `torch>=1.7`. To install run:
@@ -106,7 +111,7 @@ import torch
from PIL import Image
# Model
-model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True) # for PIL/cv2/np inputs and NMS
+model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)
# Images
img1 = Image.open('zidane.jpg')
@@ -114,13 +119,13 @@ img2 = Image.open('bus.jpg')
imgs = [img1, img2] # batched list of images
# Inference
-prediction = model(imgs, size=640) # includes NMS
+result = model(imgs)
```
## Training
-Download [COCO](https://github.com/ultralytics/yolov5/blob/master/data/scripts/get_coco.sh) and run command below. Training times for YOLOv5s/m/l/x are 2/4/6/8 days on a single V100 (multi-GPU times faster). Use the largest `--batch-size` your GPU allows (batch sizes shown for 16 GB devices).
+Run commands below to reproduce results on [COCO](https://github.com/ultralytics/yolov5/blob/master/data/scripts/get_coco.sh) dataset (dataset auto-downloads on first use). Training times for YOLOv5s/m/l/x are 2/4/6/8 days on a single V100 (multi-GPU times faster). Use the largest `--batch-size` your GPU allows (batch sizes shown for 16 GB devices).
```bash
$ python train.py --data coco.yaml --cfg yolov5s.yaml --weights '' --batch-size 64
yolov5m 40
diff --git a/data/coco.yaml b/data/coco.yaml
index 09f3a78..b9da2bf 100644
--- a/data/coco.yaml
+++ b/data/coco.yaml
@@ -18,15 +18,15 @@ test: ../coco/test-dev2017.txt # 20288 of 40670 images, submit to https://compe
nc: 80
# class names
-names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush']
+names: [ 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
+ 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
+ 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
+ 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
+ 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
+ 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
+ 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
+ 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
+ 'hair drier', 'toothbrush' ]
# Print classes
# with open('data/coco.yaml') as f:
diff --git a/data/coco128.yaml b/data/coco128.yaml
index 12e1d79..c41bccf 100644
--- a/data/coco128.yaml
+++ b/data/coco128.yaml
@@ -17,12 +17,12 @@ val: ../coco128/images/train2017/ # 128 images
nc: 80
# class names
-names: ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush']
+names: [ 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
+ 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
+ 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
+ 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
+ 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
+ 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
+ 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
+ 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
+ 'hair drier', 'toothbrush' ]
diff --git a/data/voc.yaml b/data/voc.yaml
index b93f6a0..851a9e0 100644
--- a/data/voc.yaml
+++ b/data/voc.yaml
@@ -17,5 +17,5 @@ val: ../VOC/images/val/ # 4952 images
nc: 20
# class names
-names: ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable', 'dog',
- 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor']
+names: [ 'aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable', 'dog',
+ 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor' ]
diff --git a/models/common.py b/models/common.py
index 17b9f01..a25707f 100644
--- a/models/common.py
+++ b/models/common.py
@@ -30,7 +30,7 @@ def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, k
super(Conv, self).__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
self.bn = nn.BatchNorm2d(c2)
- self.act = nn.Hardswish() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
+ self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
def forward(self, x):
return self.act(self.bn(self.conv(x)))
@@ -105,9 +105,39 @@ class Focus(nn.Module):
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super(Focus, self).__init__()
self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
+ # self.contract = Contract(gain=2)
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
+ # return self.conv(self.contract(x))
+
+
+class Contract(nn.Module):
+ # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert (H / s == 0) and (W / s == 0), 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, C, H // s, s, W // s, s) # x(1,64,40,2,40,2)
+ x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
+ return x.view(N, C * s * s, H // s, W // s) # x(1,256,40,40)
+
+
+class Expand(nn.Module):
+ # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
+ def __init__(self, gain=2):
+ super().__init__()
+ self.gain = gain
+
+ def forward(self, x):
+ N, C, H, W = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
+ s = self.gain
+ x = x.view(N, s, s, C // s ** 2, H, W) # x(1,2,2,16,80,80)
+ x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
+ return x.view(N, C // s ** 2, H * s, W * s) # x(1,16,160,160)
class Concat(nn.Module):
@@ -253,20 +283,13 @@ def tolist(self):
return x
-class Flatten(nn.Module):
- # Use after nn.AdaptiveAvgPool2d(1) to remove last 2 dimensions
- @staticmethod
- def forward(x):
- return x.view(x.size(0), -1)
-
-
class Classify(nn.Module):
# Classification head, i.e. x(b,c1,20,20) to x(b,c2)
def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
super(Classify, self).__init__()
self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1)
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1)
- self.flat = Flatten()
+ self.flat = nn.Flatten()
def forward(self, x):
z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list
diff --git a/models/experimental.py b/models/experimental.py
index 136e86d..2dbbf7f 100644
--- a/models/experimental.py
+++ b/models/experimental.py
@@ -105,8 +105,8 @@ def forward(self, x, augment=False):
for module in self:
y.append(module(x, augment)[0])
# y = torch.stack(y).max(0)[0] # max ensemble
- # y = torch.cat(y, 1) # nms ensemble
- y = torch.stack(y).mean(0) # mean ensemble
+ # y = torch.stack(y).mean(0) # mean ensemble
+ y = torch.cat(y, 1) # nms ensemble
return y, None # inference, train output
diff --git a/models/hub/anchors.yaml b/models/hub/anchors.yaml
new file mode 100644
index 0000000..a07a4dc
--- /dev/null
+++ b/models/hub/anchors.yaml
@@ -0,0 +1,58 @@
+# Default YOLOv5 anchors for COCO data
+
+
+# P5 -------------------------------------------------------------------------------------------------------------------
+# P5-640:
+anchors_p5_640:
+ - [ 10,13, 16,30, 33,23 ] # P3/8
+ - [ 30,61, 62,45, 59,119 ] # P4/16
+ - [ 116,90, 156,198, 373,326 ] # P5/32
+
+
+# P6 -------------------------------------------------------------------------------------------------------------------
+# P6-640: thr=0.25: 0.9964 BPR, 5.54 anchors past thr, n=12, img_size=640, metric_all=0.281/0.716-mean/best, past_thr=0.469-mean: 9,11, 21,19, 17,41, 43,32, 39,70, 86,64, 65,131, 134,130, 120,265, 282,180, 247,354, 512,387
+anchors_p6_640:
+ - [ 9,11, 21,19, 17,41 ] # P3/8
+ - [ 43,32, 39,70, 86,64 ] # P4/16
+ - [ 65,131, 134,130, 120,265 ] # P5/32
+ - [ 282,180, 247,354, 512,387 ] # P6/64
+
+# P6-1280: thr=0.25: 0.9950 BPR, 5.55 anchors past thr, n=12, img_size=1280, metric_all=0.281/0.714-mean/best, past_thr=0.468-mean: 19,27, 44,40, 38,94, 96,68, 86,152, 180,137, 140,301, 303,264, 238,542, 436,615, 739,380, 925,792
+anchors_p6_1280:
+ - [ 19,27, 44,40, 38,94 ] # P3/8
+ - [ 96,68, 86,152, 180,137 ] # P4/16
+ - [ 140,301, 303,264, 238,542 ] # P5/32
+ - [ 436,615, 739,380, 925,792 ] # P6/64
+
+# P6-1920: thr=0.25: 0.9950 BPR, 5.55 anchors past thr, n=12, img_size=1920, metric_all=0.281/0.714-mean/best, past_thr=0.468-mean: 28,41, 67,59, 57,141, 144,103, 129,227, 270,205, 209,452, 455,396, 358,812, 653,922, 1109,570, 1387,1187
+anchors_p6_1920:
+ - [ 28,41, 67,59, 57,141 ] # P3/8
+ - [ 144,103, 129,227, 270,205 ] # P4/16
+ - [ 209,452, 455,396, 358,812 ] # P5/32
+ - [ 653,922, 1109,570, 1387,1187 ] # P6/64
+
+
+# P7 -------------------------------------------------------------------------------------------------------------------
+# P7-640: thr=0.25: 0.9962 BPR, 6.76 anchors past thr, n=15, img_size=640, metric_all=0.275/0.733-mean/best, past_thr=0.466-mean: 11,11, 13,30, 29,20, 30,46, 61,38, 39,92, 78,80, 146,66, 79,163, 149,150, 321,143, 157,303, 257,402, 359,290, 524,372
+anchors_p7_640:
+ - [ 11,11, 13,30, 29,20 ] # P3/8
+ - [ 30,46, 61,38, 39,92 ] # P4/16
+ - [ 78,80, 146,66, 79,163 ] # P5/32
+ - [ 149,150, 321,143, 157,303 ] # P6/64
+ - [ 257,402, 359,290, 524,372 ] # P7/128
+
+# P7-1280: thr=0.25: 0.9968 BPR, 6.71 anchors past thr, n=15, img_size=1280, metric_all=0.273/0.732-mean/best, past_thr=0.463-mean: 19,22, 54,36, 32,77, 70,83, 138,71, 75,173, 165,159, 148,334, 375,151, 334,317, 251,626, 499,474, 750,326, 534,814, 1079,818
+anchors_p7_1280:
+ - [ 19,22, 54,36, 32,77 ] # P3/8
+ - [ 70,83, 138,71, 75,173 ] # P4/16
+ - [ 165,159, 148,334, 375,151 ] # P5/32
+ - [ 334,317, 251,626, 499,474 ] # P6/64
+ - [ 750,326, 534,814, 1079,818 ] # P7/128
+
+# P7-1920: thr=0.25: 0.9968 BPR, 6.71 anchors past thr, n=15, img_size=1920, metric_all=0.273/0.732-mean/best, past_thr=0.463-mean: 29,34, 81,55, 47,115, 105,124, 207,107, 113,259, 247,238, 222,500, 563,227, 501,476, 376,939, 749,711, 1126,489, 801,1222, 1618,1227
+anchors_p7_1920:
+ - [ 29,34, 81,55, 47,115 ] # P3/8
+ - [ 105,124, 207,107, 113,259 ] # P4/16
+ - [ 247,238, 222,500, 563,227 ] # P5/32
+ - [ 501,476, 376,939, 749,711 ] # P6/64
+ - [ 1126,489, 801,1222, 1618,1227 ] # P7/128
diff --git a/models/hub/yolov5-p2.yaml b/models/hub/yolov5-p2.yaml
new file mode 100644
index 0000000..0633a90
--- /dev/null
+++ b/models/hub/yolov5-p2.yaml
@@ -0,0 +1,54 @@
+# parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors: 3
+
+# YOLOv5 backbone
+backbone:
+ # [from, number, module, args]
+ [ [ -1, 1, Focus, [ 64, 3 ] ], # 0-P1/2
+ [ -1, 1, Conv, [ 128, 3, 2 ] ], # 1-P2/4
+ [ -1, 3, C3, [ 128 ] ],
+ [ -1, 1, Conv, [ 256, 3, 2 ] ], # 3-P3/8
+ [ -1, 9, C3, [ 256 ] ],
+ [ -1, 1, Conv, [ 512, 3, 2 ] ], # 5-P4/16
+ [ -1, 9, C3, [ 512 ] ],
+ [ -1, 1, Conv, [ 1024, 3, 2 ] ], # 7-P5/32
+ [ -1, 1, SPP, [ 1024, [ 5, 9, 13 ] ] ],
+ [ -1, 3, C3, [ 1024, False ] ], # 9
+ ]
+
+# YOLOv5 head
+head:
+ [ [ -1, 1, Conv, [ 512, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4
+ [ -1, 3, C3, [ 512, False ] ], # 13
+
+ [ -1, 1, Conv, [ 256, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P3
+ [ -1, 3, C3, [ 256, False ] ], # 17 (P3/8-small)
+
+ [ -1, 1, Conv, [ 128, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 2 ], 1, Concat, [ 1 ] ], # cat backbone P2
+ [ -1, 1, C3, [ 128, False ] ], # 21 (P2/4-xsmall)
+
+ [ -1, 1, Conv, [ 128, 3, 2 ] ],
+ [ [ -1, 18 ], 1, Concat, [ 1 ] ], # cat head P3
+ [ -1, 3, C3, [ 256, False ] ], # 24 (P3/8-small)
+
+ [ -1, 1, Conv, [ 256, 3, 2 ] ],
+ [ [ -1, 14 ], 1, Concat, [ 1 ] ], # cat head P4
+ [ -1, 3, C3, [ 512, False ] ], # 27 (P4/16-medium)
+
+ [ -1, 1, Conv, [ 512, 3, 2 ] ],
+ [ [ -1, 10 ], 1, Concat, [ 1 ] ], # cat head P5
+ [ -1, 3, C3, [ 1024, False ] ], # 30 (P5/32-large)
+
+ [ [ 24, 27, 30 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4, P5)
+ ]
diff --git a/models/hub/yolov5-p6.yaml b/models/hub/yolov5-p6.yaml
new file mode 100644
index 0000000..3728a11
--- /dev/null
+++ b/models/hub/yolov5-p6.yaml
@@ -0,0 +1,56 @@
+# parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors: 3
+
+# YOLOv5 backbone
+backbone:
+ # [from, number, module, args]
+ [ [ -1, 1, Focus, [ 64, 3 ] ], # 0-P1/2
+ [ -1, 1, Conv, [ 128, 3, 2 ] ], # 1-P2/4
+ [ -1, 3, C3, [ 128 ] ],
+ [ -1, 1, Conv, [ 256, 3, 2 ] ], # 3-P3/8
+ [ -1, 9, C3, [ 256 ] ],
+ [ -1, 1, Conv, [ 512, 3, 2 ] ], # 5-P4/16
+ [ -1, 9, C3, [ 512 ] ],
+ [ -1, 1, Conv, [ 768, 3, 2 ] ], # 7-P5/32
+ [ -1, 3, C3, [ 768 ] ],
+ [ -1, 1, Conv, [ 1024, 3, 2 ] ], # 9-P6/64
+ [ -1, 1, SPP, [ 1024, [ 3, 5, 7 ] ] ],
+ [ -1, 3, C3, [ 1024, False ] ], # 11
+ ]
+
+# YOLOv5 head
+head:
+ [ [ -1, 1, Conv, [ 768, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 8 ], 1, Concat, [ 1 ] ], # cat backbone P5
+ [ -1, 3, C3, [ 768, False ] ], # 15
+
+ [ -1, 1, Conv, [ 512, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4
+ [ -1, 3, C3, [ 512, False ] ], # 19
+
+ [ -1, 1, Conv, [ 256, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P3
+ [ -1, 3, C3, [ 256, False ] ], # 23 (P3/8-small)
+
+ [ -1, 1, Conv, [ 256, 3, 2 ] ],
+ [ [ -1, 20 ], 1, Concat, [ 1 ] ], # cat head P4
+ [ -1, 3, C3, [ 512, False ] ], # 26 (P4/16-medium)
+
+ [ -1, 1, Conv, [ 512, 3, 2 ] ],
+ [ [ -1, 16 ], 1, Concat, [ 1 ] ], # cat head P5
+ [ -1, 3, C3, [ 768, False ] ], # 29 (P5/32-large)
+
+ [ -1, 1, Conv, [ 768, 3, 2 ] ],
+ [ [ -1, 12 ], 1, Concat, [ 1 ] ], # cat head P6
+ [ -1, 3, C3, [ 1024, False ] ], # 32 (P5/64-xlarge)
+
+ [ [ 23, 26, 29, 32 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4, P5, P6)
+ ]
diff --git a/models/hub/yolov5-p7.yaml b/models/hub/yolov5-p7.yaml
new file mode 100644
index 0000000..ca8f849
--- /dev/null
+++ b/models/hub/yolov5-p7.yaml
@@ -0,0 +1,67 @@
+# parameters
+nc: 80 # number of classes
+depth_multiple: 1.0 # model depth multiple
+width_multiple: 1.0 # layer channel multiple
+
+# anchors
+anchors: 3
+
+# YOLOv5 backbone
+backbone:
+ # [from, number, module, args]
+ [ [ -1, 1, Focus, [ 64, 3 ] ], # 0-P1/2
+ [ -1, 1, Conv, [ 128, 3, 2 ] ], # 1-P2/4
+ [ -1, 3, C3, [ 128 ] ],
+ [ -1, 1, Conv, [ 256, 3, 2 ] ], # 3-P3/8
+ [ -1, 9, C3, [ 256 ] ],
+ [ -1, 1, Conv, [ 512, 3, 2 ] ], # 5-P4/16
+ [ -1, 9, C3, [ 512 ] ],
+ [ -1, 1, Conv, [ 768, 3, 2 ] ], # 7-P5/32
+ [ -1, 3, C3, [ 768 ] ],
+ [ -1, 1, Conv, [ 1024, 3, 2 ] ], # 9-P6/64
+ [ -1, 3, C3, [ 1024 ] ],
+ [ -1, 1, Conv, [ 1280, 3, 2 ] ], # 11-P7/128
+ [ -1, 1, SPP, [ 1280, [ 3, 5 ] ] ],
+ [ -1, 3, C3, [ 1280, False ] ], # 13
+ ]
+
+# YOLOv5 head
+head:
+ [ [ -1, 1, Conv, [ 1024, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 10 ], 1, Concat, [ 1 ] ], # cat backbone P6
+ [ -1, 3, C3, [ 1024, False ] ], # 17
+
+ [ -1, 1, Conv, [ 768, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 8 ], 1, Concat, [ 1 ] ], # cat backbone P5
+ [ -1, 3, C3, [ 768, False ] ], # 21
+
+ [ -1, 1, Conv, [ 512, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4
+ [ -1, 3, C3, [ 512, False ] ], # 25
+
+ [ -1, 1, Conv, [ 256, 1, 1 ] ],
+ [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
+ [ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P3
+ [ -1, 3, C3, [ 256, False ] ], # 29 (P3/8-small)
+
+ [ -1, 1, Conv, [ 256, 3, 2 ] ],
+ [ [ -1, 26 ], 1, Concat, [ 1 ] ], # cat head P4
+ [ -1, 3, C3, [ 512, False ] ], # 32 (P4/16-medium)
+
+ [ -1, 1, Conv, [ 512, 3, 2 ] ],
+ [ [ -1, 22 ], 1, Concat, [ 1 ] ], # cat head P5
+ [ -1, 3, C3, [ 768, False ] ], # 35 (P5/32-large)
+
+ [ -1, 1, Conv, [ 768, 3, 2 ] ],
+ [ [ -1, 18 ], 1, Concat, [ 1 ] ], # cat head P6
+ [ -1, 3, C3, [ 1024, False ] ], # 38 (P6/64-xlarge)
+
+ [ -1, 1, Conv, [ 1024, 3, 2 ] ],
+ [ [ -1, 14 ], 1, Concat, [ 1 ] ], # cat head P7
+ [ -1, 3, C3, [ 1280, False ] ], # 41 (P7/128-xxlarge)
+
+ [ [ 29, 32, 35, 38, 41 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4, P5, P6, P7)
+ ]
diff --git a/models/yolo.py b/models/yolo.py
index b75e939..5dc8b57 100644
--- a/models/yolo.py
+++ b/models/yolo.py
@@ -1,17 +1,13 @@
import argparse
import logging
-import math
import sys
from copy import deepcopy
from pathlib import Path
-import torch
-import torch.nn as nn
-
sys.path.append('./') # to run '$ python *.py' files in subdirectories
logger = logging.getLogger(__name__)
-from models.common import Conv, Bottleneck, SPP, DWConv, Focus, BottleneckCSP, C3, Concat, NMS, autoShape
+from models.common import *
from models.experimental import MixConv2d, CrossConv
from utils.autoanchor import check_anchor_order
from utils.general import make_divisible, check_file, set_logging
@@ -89,7 +85,7 @@ def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None): # model, input channels,
# Build strides, anchors
m = self.model[-1] # Detect()
if isinstance(m, Detect):
- s = 128 # 2x min stride
+ s = 256 # 2x min stride
m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
m.anchors /= m.stride.view(-1, 1, 1)
check_anchor_order(m)
@@ -109,7 +105,7 @@ def forward(self, x, augment=False, profile=False):
f = [None, 3, None] # flips (2-ud, 3-lr)
y = [] # outputs
for si, fi in zip(s, f):
- xi = scale_img(x.flip(fi) if fi else x, si)
+ xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
yi = self.forward_once(xi)[0] # forward
# cv2.imwrite('img%g.jpg' % s, 255 * xi[0].numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
yi[..., :4] /= si # de-scale
@@ -242,13 +238,17 @@ def parse_model(d, ch): # model_dict, input_channels(3)
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
- c2 = sum([ch[-1 if x == -1 else x + 1] for x in f])
+ c2 = sum([ch[x if x < 0 else x + 1] for x in f])
elif m is Detect:
args.append([ch[x + 1] for x in f])
if isinstance(args[1], int): # number of anchors
args[1] = [list(range(args[1] * 2))] * len(f)
+ elif m is Contract:
+ c2 = ch[f if f < 0 else f + 1] * args[0] ** 2
+ elif m is Expand:
+ c2 = ch[f if f < 0 else f + 1] // args[0] ** 2
else:
- c2 = ch[f]
+ c2 = ch[f if f < 0 else f + 1]
m_ = nn.Sequential(*[m(*args) for _ in range(n)]) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
diff --git a/models/yolov5l.yaml b/models/yolov5l.yaml
index 1309554..71ebf86 100644
--- a/models/yolov5l.yaml
+++ b/models/yolov5l.yaml
@@ -14,14 +14,14 @@ backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
- [-1, 3, BottleneckCSP, [128]],
+ [-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
- [-1, 9, BottleneckCSP, [256]],
+ [-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
- [-1, 9, BottleneckCSP, [512]],
+ [-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
- [-1, 3, BottleneckCSP, [1024, False]], # 9
+ [-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
@@ -29,20 +29,20 @@ head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
- [-1, 3, BottleneckCSP, [512, False]], # 13
+ [-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
- [-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
+ [-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
- [-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
+ [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
- [-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
+ [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
diff --git a/models/yolov5m.yaml b/models/yolov5m.yaml
index eb50a71..3c749c9 100644
--- a/models/yolov5m.yaml
+++ b/models/yolov5m.yaml
@@ -14,14 +14,14 @@ backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
- [-1, 3, BottleneckCSP, [128]],
+ [-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
- [-1, 9, BottleneckCSP, [256]],
+ [-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
- [-1, 9, BottleneckCSP, [512]],
+ [-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
- [-1, 3, BottleneckCSP, [1024, False]], # 9
+ [-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
@@ -29,20 +29,20 @@ head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
- [-1, 3, BottleneckCSP, [512, False]], # 13
+ [-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
- [-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
+ [-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
- [-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
+ [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
- [-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
+ [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
diff --git a/models/yolov5s.yaml b/models/yolov5s.yaml
index 2bec452..aca669d 100644
--- a/models/yolov5s.yaml
+++ b/models/yolov5s.yaml
@@ -14,14 +14,14 @@ backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
- [-1, 3, BottleneckCSP, [128]],
+ [-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
- [-1, 9, BottleneckCSP, [256]],
+ [-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
- [-1, 9, BottleneckCSP, [512]],
+ [-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
- [-1, 3, BottleneckCSP, [1024, False]], # 9
+ [-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
@@ -29,20 +29,20 @@ head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
- [-1, 3, BottleneckCSP, [512, False]], # 13
+ [-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
- [-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
+ [-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
- [-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
+ [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
- [-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
+ [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
diff --git a/models/yolov5x.yaml b/models/yolov5x.yaml
index 9676402..d3babdf 100644
--- a/models/yolov5x.yaml
+++ b/models/yolov5x.yaml
@@ -14,14 +14,14 @@ backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
- [-1, 3, BottleneckCSP, [128]],
+ [-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
- [-1, 9, BottleneckCSP, [256]],
+ [-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
- [-1, 9, BottleneckCSP, [512]],
+ [-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
- [-1, 3, BottleneckCSP, [1024, False]], # 9
+ [-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
@@ -29,20 +29,20 @@ head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
- [-1, 3, BottleneckCSP, [512, False]], # 13
+ [-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
- [-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
+ [-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
- [-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
+ [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
- [-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
+ [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
diff --git a/train.py b/train.py
index d0f3bdc..d61ca4b 100644
--- a/train.py
+++ b/train.py
@@ -104,6 +104,7 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
nbs = 64 # nominal batch size
accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
+ logger.info(f"Scaled weight_decay = {hyp['weight_decay']}")
pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
for k, v in model.named_modules():
@@ -164,7 +165,8 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
del ckpt, state_dict
# Image sizes
- gs = int(max(model.stride)) # grid size (max stride)
+ gs = int(model.stride.max()) # grid size (max stride)
+ nl = model.model[-1].nl # number of detection layers (used for scaling hyp['obj'])
imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
# DP mode
@@ -187,7 +189,7 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,
hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect, rank=rank,
world_size=opt.world_size, workers=opt.workers,
- image_weights=opt.image_weights)
+ image_weights=opt.image_weights, quad=opt.quad)
mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label class
nb = len(dataloader) # number of batches
assert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)
@@ -214,7 +216,8 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
# Model parameters
- hyp['cls'] *= nc / 80. # scale coco-tuned hyp['cls'] to current dataset
+ hyp['cls'] *= nc / 80. # scale hyp['cls'] to class count
+ hyp['obj'] *= imgsz ** 2 / 640. ** 2 * 3. / nl # scale hyp['obj'] to image size and output layers
model.nc = nc # attach number of classes to model
model.hyp = hyp # attach hyperparameters to model
model.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)
@@ -290,6 +293,8 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
loss, loss_items = compute_loss(pred, targets.to(device), model) # loss scaled by batch_size
if rank != -1:
loss *= opt.world_size # gradient averaged between devices in DDP mode
+ if opt.quad:
+ loss *= 4.
# Backward
scaler.scale(loss).backward()
@@ -458,10 +463,10 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
parser.add_argument('--project', default='runs/train', help='save to project/name')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--quad', action='store_true', help='quad dataloader')
opt = parser.parse_args()
# Set DDP variables
- opt.total_batch_size = opt.batch_size
opt.world_size = int(os.environ['WORLD_SIZE']) if 'WORLD_SIZE' in os.environ else 1
opt.global_rank = int(os.environ['RANK']) if 'RANK' in os.environ else -1
set_logging(opt.global_rank)
@@ -486,6 +491,7 @@ def train(hyp, opt, device, tb_writer=None, wandb=None):
opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok | opt.evolve) # increment run
# DDP mode
+ opt.total_batch_size = opt.batch_size
device = select_device(opt.device, batch_size=opt.batch_size)
if opt.local_rank != -1:
assert torch.cuda.device_count() > opt.local_rank
diff --git a/utils/autoanchor.py b/utils/autoanchor.py
index 0c33dcb..badefc1 100644
--- a/utils/autoanchor.py
+++ b/utils/autoanchor.py
@@ -110,6 +110,7 @@ def print_results(k):
print('WARNING: Extremely small objects found. '
'%g of %g labels are < 3 pixels in width or height.' % (i, len(wh0)))
wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
+ # wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
# Kmeans calculation
print('Running kmeans for %g anchors on %g points...' % (n, len(wh)))
diff --git a/utils/datasets.py b/utils/datasets.py
index e2b139f..9001832 100755
--- a/utils/datasets.py
+++ b/utils/datasets.py
@@ -15,6 +15,7 @@
import cv2
import numpy as np
import torch
+import torch.nn.functional as F
from PIL import Image, ExifTags
from torch.utils.data import Dataset
from tqdm import tqdm
@@ -55,7 +56,7 @@ def exif_size(img):
def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=False, cache=False, pad=0.0, rect=False,
- rank=-1, world_size=1, workers=8, image_weights=False):
+ rank=-1, world_size=1, workers=8, image_weights=False, quad=False):
# Make sure only the first process in DDP process the dataset first, and the following others can use the cache
with torch_distributed_zero_first(rank):
dataset = LoadImagesAndLabels(path, imgsz, batch_size,
@@ -79,7 +80,7 @@ def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=Fa
num_workers=nw,
sampler=sampler,
pin_memory=True,
- collate_fn=LoadImagesAndLabels.collate_fn)
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn)
return dataloader, dataset
@@ -578,6 +579,32 @@ def collate_fn(batch):
l[:, 0] = i # add target image index for build_targets()
return torch.stack(img, 0), torch.cat(label, 0), path, shapes
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0., 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0., 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, .5, .5, .5, .5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2., mode='bilinear', align_corners=False)[
+ 0].type(img[i].type())
+ l = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ img4.append(im)
+ label4.append(l)
+
+ for i, l in enumerate(label4):
+ l[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
+
# Ancillary functions --------------------------------------------------------------------------------------------------
def load_image(self, index):
@@ -617,7 +644,7 @@ def augment_hsv(img, hgain=0.5, sgain=0.5, vgain=0.5):
def load_mosaic(self, index):
- # loads images in a mosaic
+ # loads images in a 4-mosaic
labels4 = []
s = self.img_size
@@ -674,6 +701,80 @@ def load_mosaic(self, index):
return img4, labels4
+def load_mosaic9(self, index):
+ # loads images in a 9-mosaic
+
+ labels9 = []
+ s = self.img_size
+ indices = [index] + [self.indices[random.randint(0, self.n - 1)] for _ in range(8)] # 8 additional image indices
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = [max(x, 0) for x in c] # allocate coords
+
+ # Labels
+ x = self.labels[index]
+ labels = x.copy()
+ if x.size > 0: # Normalized xywh to pixel xyxy format
+ labels[:, 1] = w * (x[:, 1] - x[:, 3] / 2) + padx
+ labels[:, 2] = h * (x[:, 2] - x[:, 4] / 2) + pady
+ labels[:, 3] = w * (x[:, 1] + x[:, 3] / 2) + padx
+ labels[:, 4] = h * (x[:, 2] + x[:, 4] / 2) + pady
+ labels9.append(labels)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = [int(random.uniform(0, s)) for x in self.mosaic_border] # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ if len(labels9):
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+
+ np.clip(labels9[:, 1:], 0, 2 * s, out=labels9[:, 1:]) # use with random_perspective
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ img9, labels9 = random_perspective(img9, labels9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+
def replicate(img, labels):
# Replicate labels
h, w = img.shape[:2]
@@ -811,12 +912,12 @@ def random_perspective(img, targets=(), degrees=10, translate=.1, scale=.1, shea
return img, targets
-def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1): # box1(4,n), box2(4,n)
+def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
# Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
- ar = np.maximum(w2 / (h2 + 1e-16), h2 / (w2 + 1e-16)) # aspect ratio
- return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + 1e-16) > area_thr) & (ar < ar_thr) # candidates
+ ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
+ return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
def cutout(image, labels):
diff --git a/utils/general.py b/utils/general.py
index fceefb0..797587b 100755
--- a/utils/general.py
+++ b/utils/general.py
@@ -281,6 +281,7 @@ def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=Non
# Settings
min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
max_det = 300 # maximum number of detections per image
+ max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
time_limit = 10.0 # seconds to quit after
redundant = True # require redundant detections
multi_label = nc > 1 # multiple labels per box (adds 0.5ms/img)
@@ -328,13 +329,12 @@ def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=Non
# if not torch.isfinite(x).all():
# x = x[torch.isfinite(x).all(1)]
- # If none remain process next image
+ # Check shape
n = x.shape[0] # number of boxes
- if not n:
+ if not n: # no boxes
continue
-
- # Sort by confidence
- # x = x[x[:, 4].argsort(descending=True)]
+ elif n > max_nms: # excess boxes
+ x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
# Batched NMS
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
@@ -352,6 +352,7 @@ def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=Non
output[xi] = x[i]
if (time.time() - t) > time_limit:
+ print(f'WARNING: NMS time limit {time_limit}s exceeded')
break # time limit exceeded
return output
diff --git a/utils/google_utils.py b/utils/google_utils.py
index f97349d..242270c 100644
--- a/utils/google_utils.py
+++ b/utils/google_utils.py
@@ -6,6 +6,7 @@
import time
from pathlib import Path
+import requests
import torch
@@ -21,21 +22,14 @@ def attempt_download(weights):
file = Path(weights).name.lower()
msg = weights + ' missing, try downloading from https://github.com/ultralytics/yolov5/releases/'
- models = ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt'] # available models
- redundant = False # offer second download option
-
- if file in models and not os.path.isfile(weights):
- # Google Drive
- # d = {'yolov5s.pt': '1R5T6rIyy3lLwgFXNms8whc-387H0tMQO',
- # 'yolov5m.pt': '1vobuEExpWQVpXExsJ2w-Mbf3HJjWkQJr',
- # 'yolov5l.pt': '1hrlqD1Wdei7UT4OgT785BEk1JwnSvNEV',
- # 'yolov5x.pt': '1mM8aZJlWTxOg7BZJvNUMrTnA2AbeCVzS'}
- # r = gdrive_download(id=d[file], name=weights) if file in d else 1
- # if r == 0 and os.path.exists(weights) and os.path.getsize(weights) > 1E6: # check
- # return
+ response = requests.get('https://github.com/gitapi/repos/ultralytics/yolov5/releases/latest').json() # github api
+ assets = [x['name'] for x in response['assets']] # release assets, i.e. ['yolov5s.pt', 'yolov5m.pt', ...]
+ redundant = False # second download option
+ if file in assets and not os.path.isfile(weights):
try: # GitHub
- url = 'https://github.com/ultralytics/yolov5/releases/download/v3.1/' + file
+ tag = response['tag_name'] # i.e. 'v1.0'
+ url = f'https://github.com/ultralytics/yolov5/releases/download/{tag}/{file}'
print('Downloading %s to %s...' % (url, weights))
torch.hub.download_url_to_file(url, weights)
assert os.path.exists(weights) and os.path.getsize(weights) > 1E6 # check
@@ -53,10 +47,9 @@ def attempt_download(weights):
return
-def gdrive_download(id='1uH2BylpFxHKEGXKL6wJJlsgMU2YEjxuc', name='tmp.zip'):
- # Downloads a file from Google Drive. from utils.google_utils import *; gdrive_download()
+def gdrive_download(id='16TiPfZj7htmTyhntwcZyEEAejOUxuT6m', name='tmp.zip'):
+ # Downloads a file from Google Drive. from yolov5.utils.google_utils import *; gdrive_download()
t = time.time()
-
print('Downloading https://drive.google.com/uc?export=download&id=%s as %s... ' % (id, name), end='')
os.remove(name) if os.path.exists(name) else None # remove existing
os.remove('cookie') if os.path.exists('cookie') else None
diff --git a/utils/loss.py b/utils/loss.py
index 2049516..46051f2 100644
--- a/utils/loss.py
+++ b/utils/loss.py
@@ -106,7 +106,7 @@ def compute_loss(p, targets, model): # predictions, targets, model
# Losses
nt = 0 # number of targets
no = len(p) # number of outputs
- balance = [4.0, 1.0, 0.4] if no == 3 else [4.0, 1.0, 0.4, 0.1] # P3-5 or P3-6
+ balance = [4.0, 1.0, 0.3, 0.1, 0.03] # P3-P7
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
@@ -140,7 +140,7 @@ def compute_loss(p, targets, model): # predictions, targets, model
s = 3 / no # output count scaling
lbox *= h['box'] * s
- lobj *= h['obj'] * s * (1.4 if no == 4 else 1.)
+ lobj *= h['obj']
lcls *= h['cls'] * s
bs = tobj.shape[0] # batch size
diff --git a/utils/plots.py b/utils/plots.py
index 6b4e301..c883ea2 100644
--- a/utils/plots.py
+++ b/utils/plots.py
@@ -223,7 +223,7 @@ def plot_targets_txt(): # from utils.plots import *; plot_targets_txt()
plt.savefig('targets.jpg', dpi=200)
-def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_txt()
+def plot_study_txt(path='study/', x=None): # from utils.plots import *; plot_study_txt()
# Plot study.txt generated by test.py
fig, ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)
ax = ax.ravel()
@@ -246,7 +246,7 @@ def plot_study_txt(path='', x=None): # from utils.plots import *; plot_study_tx
ax2.grid()
ax2.set_xlim(0, 30)
- ax2.set_ylim(28, 50)
+ ax2.set_ylim(29, 51)
ax2.set_yticks(np.arange(30, 55, 5))
ax2.set_xlabel('GPU Speed (ms/img)')
ax2.set_ylabel('COCO AP val')
diff --git a/utils/torch_utils.py b/utils/torch_utils.py
index 69a3121..75bcb7f 100644
--- a/utils/torch_utils.py
+++ b/utils/torch_utils.py
@@ -225,8 +225,8 @@ def load_classifier(name='resnet101', n=2):
return model
-def scale_img(img, ratio=1.0, same_shape=False): # img(16,3,256,416), r=ratio
- # scales img(bs,3,y,x) by ratio
+def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
+ # scales img(bs,3,y,x) by ratio constrained to gs-multiple
if ratio == 1.0:
return img
else:
@@ -234,7 +234,6 @@ def scale_img(img, ratio=1.0, same_shape=False): # img(16,3,256,416), r=ratio
s = (int(h * ratio), int(w * ratio)) # new size
img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize
if not same_shape: # pad/crop img
- gs = 32 # (pixels) grid size
h, w = [math.ceil(x * ratio / gs) * gs for x in (h, w)]
return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean